力系中各力的作用线不处于同一平面内时, 这样的力系称为空间力系。与平面力系一样, 空间力系可以分为空间汇交力系、空间力偶系、空间平行力系和空间任意力系。
1 空间汇交力系
当空间力系中各力作用线汇交于一点时,称之为空间汇交力系。
1.1 力在直角坐标轴上的投影
在空间中,若已知力 \mathbf{F} 与直角坐标系 {Oxyz} 三轴间的夹角为 \theta \text{、}\beta \text{、}\gamma ,如图 1a 所示,则力 \mathbf{F} 在三根坐标轴上的投影为
称此为直接 (一次) 投影法。当力 F 与 x\text{、}y 轴间的夹角未知或不易确定,但已知图 1b 所示角度 \gamma \text{、}\varphi 时,可采用间接 (二次) 投影法,如图 1b 所示,为
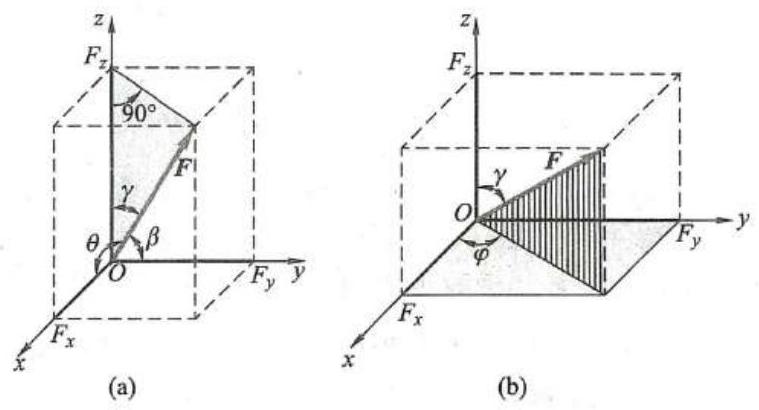
图 1
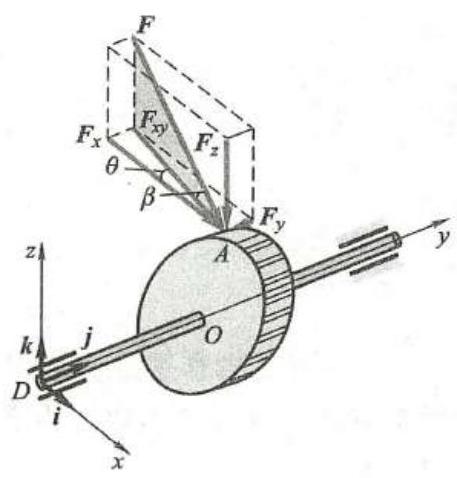
例1 图 2 所示的圆柱斜齿轮,其上受啮合力 \mathbf{F} 的作用。已知斜齿轮的齿倾角 (螺旋角 )\beta 和压力角 \theta ,求力 \mathbf{F} 在 x\text{、}y\text{、}z 轴上的投影。
解: 先把力 \mathbf{F} 向 z 轴和 {Oxy} 平面投影,有
{F}_{z} = - F\sin \theta{F}_{xy} = F\cos \theta图 2
再把 {\mathbf{F}}_{xy} 向 x 、 y 轴投影得
{F}_{x} = {F}_{xy}\cos \beta = F\cos \theta \cos \beta{F}_{y} = - {F}_{xy}\sin \beta = - F\cos \theta \sin \beta
1.2 空间汇交力系的合力与平衡条件
将平面汇交力系的合成法则扩展到空间汇交力系,可得:空间汇交力系的合力等于各分力的矢量和,合力的作用线通过汇交点。合力矢为
或
其中, {F}_{x} 、 {F}_{y} 、 {F}_{z} 为各分力在 x 、 y 、 z 轴上的投影,在各分力已知的情况下,可求得合力的大小和方向余弦为
(4)
由于空间汇交力系合成为一个合力, 显然, 空间汇交力系平衡的必要和充分条件为:该力系的合力等于零,即
式 (5) 称为空间汇交力系的平衡条件。由式 (3) 可知,为使合力 {F}_{\mathrm{R}} 为零,必须同时满足
空间汇交力系平衡的必要和充分条件为:该力系中所有各力在三根坐标轴上的投影的代数和分别等于零。式(6)被称为空间汇交力系的平衡方程。
用式 (6) 求解空间汇交力系的平衡问题, 被称为解空间汇交力系平衡问题的解析法。应用解析法求解空间汇交力系的平衡问题的步骤,与平面汇交力系问题相同,只不过需列出 3 个平衡方程,可求解 3 个未知量。
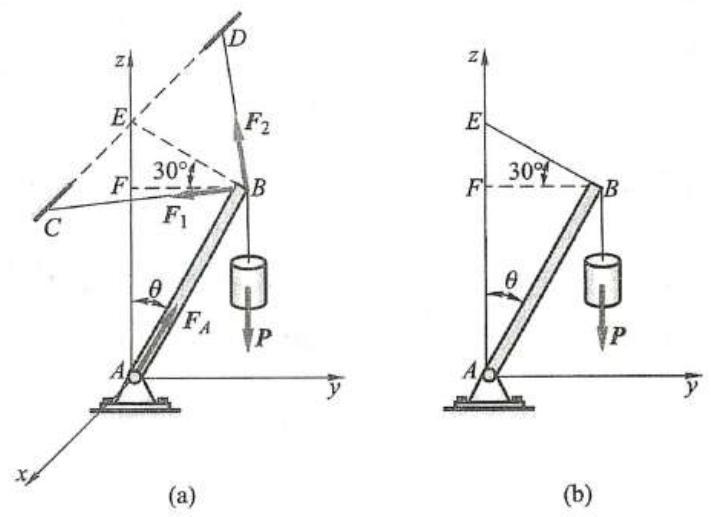
例 2 如图 3a 所示,用起重杆吊起重物,起重杆的 A 端用球铰链固定在地面上, B 端用两根等长绳 {CB} 和 {DB} 拉住,两绳分别系在墙上的点 C 和点 D ,连线 {CD} 平行于 x 轴。已知: {CE} = {EB} = {ED},\theta = {30}^{ \circ } ,物重 P = {10}\mathrm{{kN}} 。起重杆的重量不计, {CDB} 平面与水平面间的夹角 \angle {EBF} = {30}^{ \circ } (图 3b)。求起重杆和绳子所受的力。
解: 取起重杆 {AB} 与重物为研究对象,其上受主动力 P 及 B 处绳子的拉力 {F}_{1} 与 {F}_{2} 作用; 因为起重杆重量不计,只在 A\text{、}B 两端受力,所以起重杆 {AB} 为二力杆,球铰 A 对起重杆 {AB} 的约束力用 {\mathbf{F}}_{A} 表示,其沿着 A\text{、}B 两点连线。 \mathbf{P}\text{、}{\mathbf{F}}_{1}\text{、}{\mathbf{F}}_{2}\text{、}{\mathbf{F}}_{A} 四个力汇交于点 B ,为一空间汇交力系,如图 3a 所示。
图 3
用解析法求解。建立坐标系如图所示,由已知条件可知, \angle {CBE} = \angle {DBE} = {45}^{ \circ } ,列平衡方程:
\sum {F}_{x} = 0,\;{F}_{1}\sin {45}^{ \circ } - {F}_{2}\sin {45}^{ \circ } = 0\sum {F}_{y} = 0,\;{F}_{A}\sin {30}^{ \circ } - {F}_{1}\cos {45}^{ \circ }\cos {30}^{ \circ } - {F}_{2}\cos {45}^{ \circ }\cos {30}^{ \circ } = 0\sum {F}_{z} = 0,\;{F}_{1}\cos {45}^{ \circ }\sin {30}^{ \circ } + {F}_{2}\cos {45}^{ \circ }\sin {30}^{ \circ } + {F}_{A}\cos {30}^{ \circ } - P = 0求解上面的三个平衡方程, 得
{F}_{1} = {F}_{2} = {3.54}\mathrm{{kN}},\;{F}_{A} = {8.66}\mathrm{{kN}}{F}_{A} 为正值,说明图中所设 {F}_{A} 的方向正确,起重杆 {AB} 受压力。
2 力对点的矩和力对轴的矩
2.1 力对点的矩以矢量表示——力矩矢
对于平面力系, 用代数量表示力对点的矩足以概括它的全部要素。但是, 在空间情况下, 不仅要考虑力矩的大小、转向, 而且还要注意力与矩心所组成的平面 (力矩作用面)的方位。方位不同,即使力矩大小一样, 作用效果也将完全不同。这三个因素可以用力矩矢 {M}_{0}\left( F\right) 来描述。其中,矢量的模即 \left| {{M}_{O}\left( \mathbf{F}\right) }\right| = F \cdot h = 2{A}_{\bigtriangleup {OAB}} ; 矢量的方位和力矩作用面的法线方向相同;矢量的指向按右手螺旋法则来确定, 如图 4 所示。
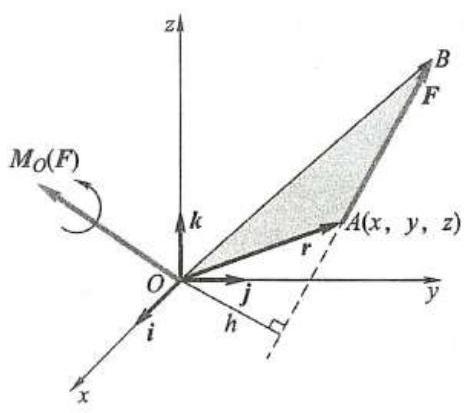
图 4
由图 4 可见,以 r 表示力作用点 A 的矢径,则矢积 \mathbf{r} \times \mathbf{F} 的模等于力矩的大小,由右手螺旋法则,力矩的转向与 \mathbf{r} \times \mathbf{F} 一致, 而 \mathbf{r} \times \mathbf{F} 所在直线则决定了力矩作用面的方位。因此可得
上式为力对点的矩的矢积表达式, 即力对点的力矩矢等于矩心到该力作用点的矢径与该力的矢积。
若以矩心 O 为原点,建立空间直角坐标系 {Oxyz} ,如图 4 所示,力作用点 A 的坐标为 A\left( {x, y, z}\right) ,力在三根坐标轴上的投影分别为 {F}_{x}\text{、}{F}_{y}\text{、}{F}_{z} ,则矢径 \mathbf{r} 和力 \mathbf{F} 可分别表示为
代入式 (7), 并采用行列式形式, 得
由于力矩矢 {M}_{0}\left( \mathbf{F}\right) 的大小和方向都与矩心0的位置有关,因此力矩矢的始端必须画在矩心,不可任意挪动,这种矢量称为定位矢量。
2.2 力对轴的矩
工程中经常遇到刚体绕定轴转动的情形, 为了度量力对刚体定轴转动的作用效果,必须了解力对轴的矩。如图 5a 所示,在斜齿轮上作用一力 \mathbf{F} ,使其绕固定轴 z 转动。把力 \mathbf{F} 分解为平行于 z 轴的分力 {\mathbf{F}}_{z} 和垂直于 z 轴的分力 {\mathbf{F}}_{xy} ,由经验可知,分力 {\mathbf{F}}_{z} 不能使静止的刚体绕 z 轴转动,故此分力对 z 轴的矩为零。只有分力 {\mathbf{F}}_{xy} 才能使静止的刚体绕 z 轴转动。现用符号 {M}_{z}\left( \mathbf{F}\right) 表示力 \mathbf{F} 对 z 轴的矩,点 O 为平面 {Oxy} 与 z 轴的交点, {OA} = h 为点 O 到力 {F}_{xy} 作用线的距离。因此,力 F 对 z 轴的矩就是分力 {F}_{xy} 对点 O 的矩,如图 5a 所示,以公式表示为
于是, 可得力对轴的矩的定义如下: 力对轴的矩是力使刚体绕该轴转动效果的度量, 是一个代数量, 其绝对值等于该力在垂直于该轴的平面上的投影对于这个平面与该轴的交点的矩的大小。其正负号规定为: 从 z -轴正端来看,若力使物体绕该轴逆时针转向取正号,反之则取负号。也可按右手螺旋法则确定其正负号,如图 5b 所示,拇指指向与 z 轴一致为正,反之为负。
力对轴的矩等于零的情形: (1) 当力与轴相交时 (此时 h = 0 ); (2) 当力与轴平行时 (此时 {\mathbf{F}}_{xy} = \mathbf{0} )。这两种情形可以合起来说: 当力与轴在同一平面内时,力对该轴的矩等于零。
力对轴的矩的单位为 \mathrm{N} \cdot \mathrm{m} 。
力对轴的矩也可用解析式表示。设力 \mathbf{F} 在三根坐标轴上的投影分别为 {F}_{x} 、 {F}_{y} 、 {F}_{z} 。力作用点 A 的坐标为 A\left( {x, y, z}\right) ,如图 6 所示。根据合力矩定理, 得
即
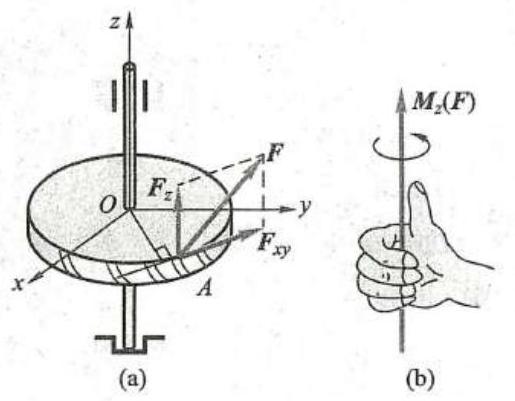
图 5
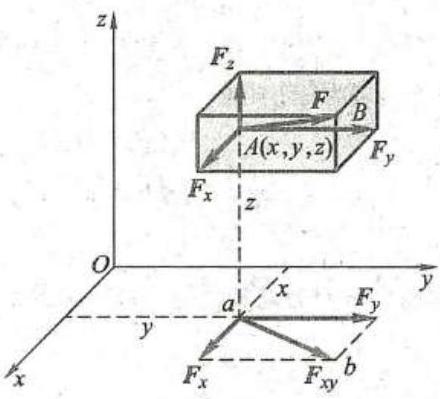
图 6
同理可得对 x 、 y 轴的矩,把三式合写为
以上三式是计算力对轴之矩的解析式。
2.3 空间力对点的矩与力对通过该点的轴的矩的关系
由空间力对点的矩的矢量解析式 (8) 可知,单位矢量 i\text{、}j\text{、}k 前面的三个系数,分别表示力对点的力矩矢 {\mathbf{M}}_{0}\left( \mathbf{F}\right) 在三根坐标轴上的投影,即
比较式(10)与式(11),可得
上式说明:空间力对点的力矩矢在通过该点的某轴上的投影,等于力对该轴的矩。
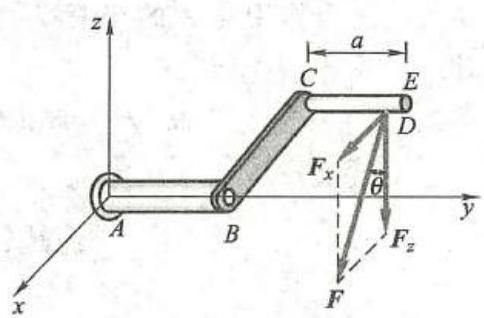
例 3 手柄 {ABCE} 位于平面 {Axy} 内,在 D 处作用一力 F ,它在垂直于 y 轴的平面内,偏离铅垂线的角度为 \theta ,如图 7 所示。 {CD} = a ,杆 {BC} 平行于 x 轴,杆 {CE} 平行于 y 轴, {AB} = {BC} = l ,求力 \mathbf{F} 对 x\text{、}y 、 z 轴的矩。
图 7
解: 将力 F 沿坐标轴分解为 {F}_{x} 和 {F}_{z} 两个分力, 其中
{F}_{x} = F\sin \theta ,\;{F}_{z} = F\cos \theta根据合力矩定理,力 \mathbf{F} 对各轴的矩等于分力 {\mathbf{F}}_{x} 和 {\mathbf{F}}_{z} 对同一轴的矩的代数和。注意到力与轴平行或相交时对轴的矩为零, 于是有
{M}_{x}\left( \mathbf{F}\right) = {M}_{x}\left( {\mathbf{F}}_{z}\right) = - {F}_{z} \cdot \left( {{AB} + {CD}}\right) = - F\left( {l + a}\right) \cos \theta{M}_{y}\left( \mathbf{F}\right) = {M}_{y}\left( {\mathbf{F}}_{z}\right) = - {F}_{z} \cdot {BC} = - {Fl}\cos \theta{M}_{z}\left( F\right) = {M}_{z}\left( {F}_{x}\right) = - {F}_{z} \cdot \left( {{AB} + {CD}}\right) = - F\left( {l + a}\right) \sin \theta
3 空间力偶
3.1 力偶矩以矢量表示——力偶矩矢
和空间中力对点的矩类似,在空间中,力偶对物体的作用效果还与力偶的作用面有关。图 8 所示为一长方体,同一个力偶作用在平面 {ABCD} 内和平面 {ABFE} 内, 显然, 力偶对物体的作用效果不同, 这是由于力偶作用面不同所致。在这种情况下, 力偶对物体的作用效果取决于三个要素:
(1)力偶中力的大小与力偶臂的乘积;
(2)力偶使物体转动的方向;
(3)力偶的作用面。
类同空间力对点的矩,空间中的力偶矩矢用矢量叉乘来表示,如图 9a 所示, 为
静力学方向可用右手螺旋法则确定:四指的指向与力的方向相同,转轴位于两个力之间, 将转轴握在掌心,大拇指的指向即为力偶矩矢的方向。如图 9b 所示。
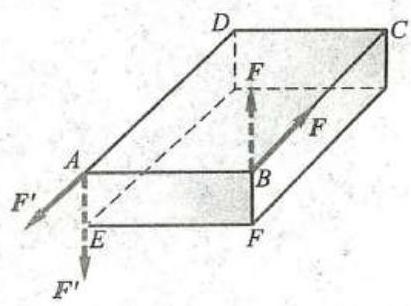
图 8
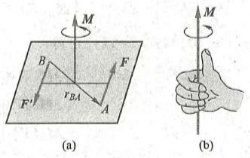
图 9
如图 10 所示为一空间力偶,其力偶矩矢为 \mathbf{M} = {\mathbf{r}}_{BA} \times \mathbf{F} ,因力偶是由两个力组成的,现计算力偶中这两个力对空间任意一点 O 的力偶矩矢。力 \mathbf{F} 对点 O 的力矩矢为 {M}_{0}\left( \mathbf{F}\right) = {\mathbf{r}}_{A} \times \mathbf{F} ,力 {\mathbf{F}}^{\prime } 对点 O 的力矩矢为 {M}_{0}\left( {\mathbf{F}}^{\prime }\right) = {\mathbf{r}}_{B} \times {\mathbf{F}}^{\prime } ,则力偶 \left( {\mathbf{F},{\mathbf{F}}^{\prime }}\right) 中两力对点 O 的力矩矢以 {M}_{0}\left( {F,{F}^{\prime }}\right) 表示,为
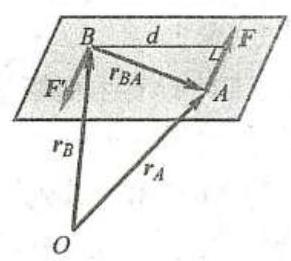
图 10
因 \mathbf{F} = - {\mathbf{F}}^{\prime } ,有
此计算结果表明,力偶对空间任意一点的力矩矢与矩心位置无关,都等于力偶矩矢。由于力偶矩矢无须确定矢量的初端位置,只要其大小、方向不变,画在任意位置均可,这样的矢量称为自由矢量。
3.2 空间力偶等效定理
由于空间力偶对刚体的作用效果完全由力偶矩矢确定, 而力偶矩矢是自由矢量, 因此两个空间力偶不论作用在刚体的什么位置, 也不论力的大小、方向与力偶臂的长短,只要力偶矩矢相等,两力偶就等效。这就是空间力偶等效定理, 即作用在同一刚体上的两个空间力偶, 如果其力偶矩矢相等, 则它们彼此等效。
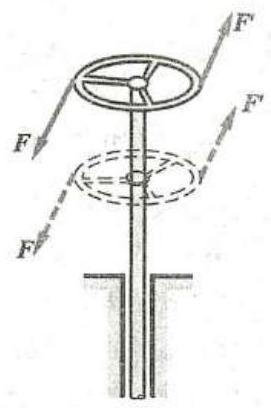
图 11
这一定理表明:空间力偶可以平移到与其作用面平行的任意平面上而不改变力偶对刚体的作用效果, 也可以同时改变力与力偶臂的大小或将力偶在其作用面内任意移转,只要力偶矩矢的大小、方向不变,其作用效果就不变。
图 11 和图 12 是说明此性质的两个实例。
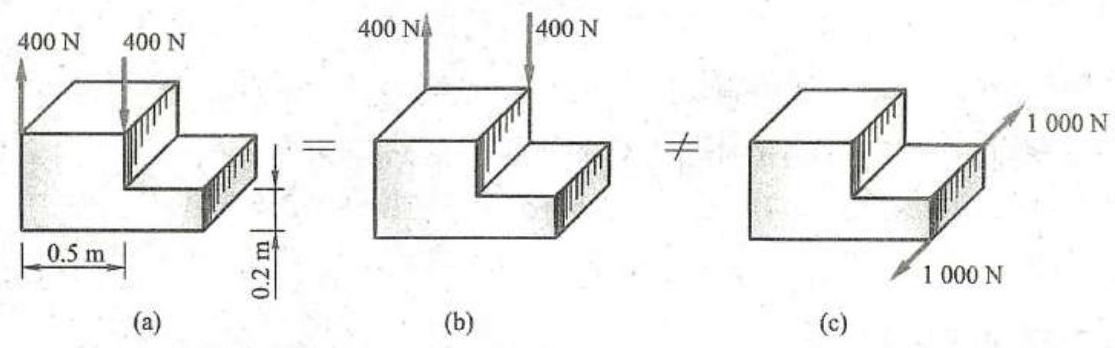
图 12
3.3 空间力偶系的合成与平衡条件
任意个空间分布的力偶可合成为一个合力偶, 合力偶矩矢等于各分力偶矩矢的矢量和,即
证明: 设有力偶矩矢为 {\mathbf{M}}_{1} 和 {\mathbf{M}}_{2} 的两个力偶, 分别作用在相交的平面 \mathrm{I} 和平面 \mathrm{{II}} 内, 如图 13 所示。首先,证明它们合成的结果为一力偶。为此, 在这两平面的交线上取任意线段 {AB} = d ,利用力偶的等效条件,将两力偶分别在其作用面内移转和变换, 使它们具有共同的力偶臂 d ,而保持力偶矩矢的大小和力偶的转向不变, 即令
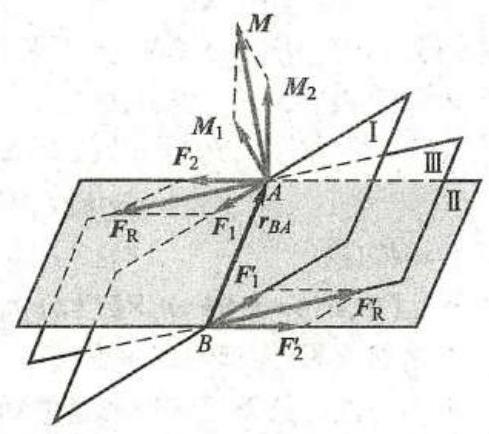
图 13
再分别合成 A\text{、}B 两点的汇交力,得 {\mathbf{F}}_{\mathrm{R}} = {\mathbf{F}}_{1} + {\mathbf{F}}_{2},{\mathbf{F}}_{\mathrm{R}}^{\prime } = {\mathbf{F}}_{1}^{\prime } + {\mathbf{F}}_{2}^{\prime } 。显然,力 {\mathbf{F}}_{\mathrm{R}} 与力 {\mathbf{F}}_{\mathrm{R}}^{\prime } 等值、反向、平行且不共线,形成一个力偶,它作用在平面 \mathrm{{II}} 内,令其力偶矩矢为 M ,从图 13 可见
因为一个力偶矩矢 \mathbf{M} 与两个力偶矩矢 {\mathbf{M}}_{1} 和 {\mathbf{M}}_{2} 等效,所以力偶矩矢 \mathbf{M} 称为合力偶矩矢。此结果说明:合力偶矩矢等于原有两个力偶矩矢的矢量和。
如有 n 个空间力偶,按上述方法逐次合成,最后得一力偶,式(13)得证。
也可用力偶矩矢为自由矢量的特性,将这些力偶矩矢移动到同一点,由矢量的合成法则,式 (13) 同样成立。
用解析法求合力偶矩矢, 由矢量投影定理, 有
所以有合力偶矩矢 \mathbf{M} 的大小和方向为
由于空间力偶系可以用一个合力偶来代替, 显然, 空间力偶系平衡的充分必要条件是:该力偶系的合力偶矩矢等于零,即各分力偶矩矢的矢量和等于零,即
写成解析表达式则为
称此为空间力偶系的平衡方程, 即该力偶系中各分力偶矩矢在三根坐标轴上投影的代数和分别等于零。
由上述三个独立的平衡方程可求解三个未知量。
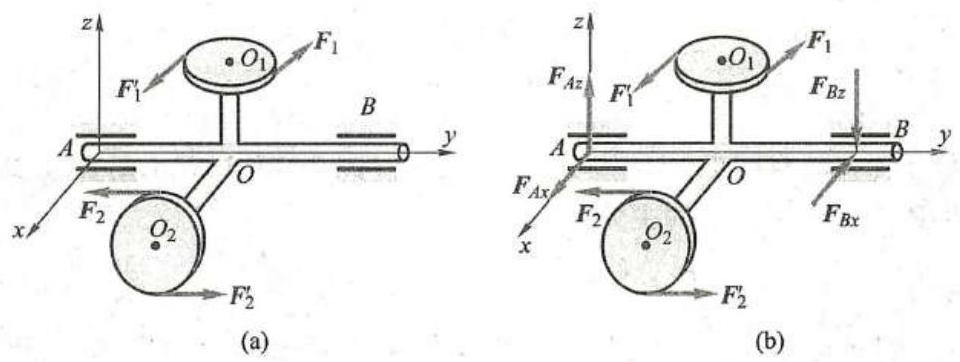
例 4 如图 14a 所示,不计各构件的自重,圆盘 {O}_{1} 与 {O}_{2} 分别和水平轴 {AB} 固连, {AB} = {800}\mathrm{\;{mm}},{O}_{1} 盘面垂直于 z 轴, {O}_{2} 盘面垂直于 x 轴,盘面上分别作用有力偶 \left( {{F}_{1},{F}_{1}^{\prime }}\right) 与 \left( {{F}_{2},{F}_{2}^{\prime }}\right) 。 两圆盘半径均为 {200}\mathrm{\;{mm}},{F}_{1} = {30}\mathrm{\;N},{F}_{2} = {50}\mathrm{\;N} 。求轴承 A 和 B 处的约束力。
图 14
解:取整体为研究对象, 由于自重不计, 主动力为两个力偶, 由力偶只能由力偶来平衡的性质,轴承 A 和 B 处的约束力也应形成力偶。轴承 A 和 B 处的约束力分别以 {\mathbf{F}}_{Ax}\text{、}{\mathbf{F}}_{Az}\text{、}{\mathbf{F}}_{Bz} 表示,方向如图 14b 所示。 {\mathbf{F}}_{Ax} 与 {\mathbf{F}}_{Bx} 形成一力偶,力偶矩矢沿 z 轴, {\mathbf{F}}_{Ax} 与 {\mathbf{F}}_{Bx} 形成一力偶,力偶矩矢沿 x 轴。力偶 \left( {{F}_{1},{F}_{1}^{\prime }}\right) 的力偶矩矢沿 z 轴,力偶 \left( {{F}_{2},{F}_{2}^{\prime }}\right) 的力偶矩矢沿 x 轴。由力偶系的平衡方程, 有
\sum {M}_{ix} = 0,\;{400}\mathrm{\;{mm}} \cdot {F}_{2} - {800}\mathrm{\;{mm}} \cdot {F}_{Az} = 0\sum {M}_{it} = 0,\;{400}\mathrm{\;{mm}} \cdot {F}_{1} - {800}\mathrm{\;{mm}} \cdot {F}_{Ax} = 0分别解得
{F}_{Ax} = {F}_{Bx} = - {15}\mathrm{\;N},\;{F}_{Az} = {F}_{Bz} = {25}\mathrm{\;N}
3.4 空间任意力系的简化
当空间力系中各力的作用线在空间任意分布时,称之为空间任意力系。
3.4.1 空间任意力系的简化 - 主矢和主矩
设刚体上作用有 n 个力 {\mathbf{F}}_{1},{\mathbf{F}}_{2},\cdots ,{\mathbf{F}}_{n} ,形成一空间任意力系,如图 15a 所示。与平面任意力系的简化方法一样,任取一点以 O 表示,称之为简化中心。应用力的平移定理,依次将作用于刚体上的每个力向简化中心 O 平移,同时附加一个相应的力偶, 和平面力系不同的是, 力偶矩以矢量表示。这样, 原来的空间任意力系被空间汇交力系和空间力偶系两个简单力系等效替换, 如图 15b 所示。其中,各力 {\mathbf{F}}_{i}^{\prime } = {\mathbf{F}}_{i} ,各力偶矩矢等于各分力对点 O 的力矩矢,即
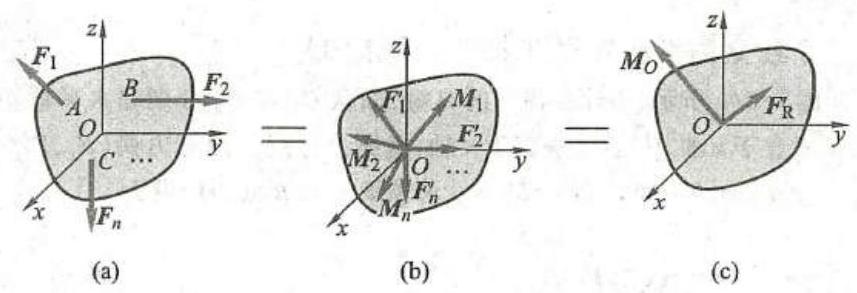
图 15
作用于点 O 的空间汇交力系可合成一力 {\mathbf{F}}_{\mathrm{R}}^{\prime }\left( \text{图 15c}\right) ,此力的作用线通过点 0,其大小和方向等于力系的主矢,即
空间力偶系可合成为一力偶,其力偶矩矢用 {\mathbf{M}}_{0} 表示,如图 15c 所示,为
显然, 此力偶不能与原任意力系等效, 不能称其为原任意力系的合力偶, 称其为原力系的主矩。可以看出, 若选不同的点为简化中心, 各力的矢径 (力臂) 一般将要改变, 所以主矩一般与简化中心有关。
求空间任意力系主矢的大小和方向,通常采用解析法,即
式中, \sum {F}_{ix}\text{、}\sum {F}_{iy}\text{、}\sum {F}_{iz} 分别表示各分力 {F}_{i} 在 x\text{、}y\text{、}z 轴上投影的代数和。
求空间任意力系主矩的大小和方向,通常也采用解析法,且考虑到空间力对点的矩与力对过该点的轴的矩的关系, 把空间力对点的矩的矢量计算转换为对轴的矩的代数计算, 有
式中, \sum {M}_{ix}\text{、}\sum {M}_{iy}\text{、}\sum {M}_{iz} 分别表示各分力 {F}_{i} 对 x\text{、}y\text{、}z 轴的矩的代数和。
举例说明空间任意力系简化的实际应用:飞机在飞行时受到重力、升力、 推力、阻力等组成的空间任意力系作用,实际分布特别复杂,为考虑其总体效果,通过飞机重心 O 建立直角坐标系 {Oxyz} ,如图 16 所示。把力系向飞机的重心 O 简化,由空间任意力系简化理论,可得一力 {\mathbf{F}}_{\mathrm{R}}^{\prime } 与一力偶 {\mathbf{M}}_{0} 。把此力和力偶矩矢向上
述三根坐标轴分解,则得到三个作用于重心 O 的正交分力 {\mathbf{F}}_{\mathrm{R}x}^{\prime }\text{、}{\mathbf{F}}_{\mathrm{R}y}^{\prime }\text{、}{\mathbf{F}}_{\mathrm{R}z}^{\prime } 和三个绕坐标轴的力偶矩 {\mathbf{M}}_{{O}_{x}}\text{、}{\mathbf{M}}_{{O}_{y}}\text{、}{\mathbf{M}}_{{O}_{z}} 。可以清楚地看出它们的意义分别是:
{F}_{\mathrm{{Rx}}}^{\prime } 一有效推进力; {F}_{\mathrm{{Ry}}}^{\prime } 一有效升力; {F}_{\mathrm{{Rz}}}^{\prime } 一侧向力;
{M}_{{O}_{x}} ——滚转力偶矩; {M}_{{O}_{y}} ——偏航力偶矩; {M}_{{O}_{z}} ——俯仰力偶矩
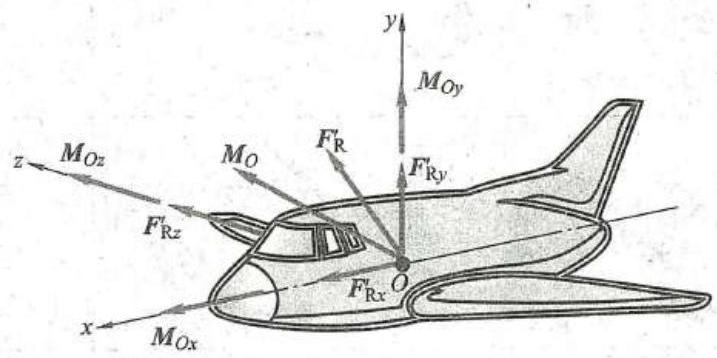
图 16
在平面任意力系的简化中, 曾讨论了平面固定端约束。当烟囱、水塔、电线杆等所受到的主动力为一空间任意力系时,约束力也是空间分布的,如图 17a 所示,利用空间任意力系简化的理论,把此复杂力系向点 A 简化,得到一个力 {F}_{\mathrm{{RA}}} 和一个力偶 {M}_{A} ,如图 17b 所示。通常情况下,为求解方便计,用它们的正交分量 {\mathbf{F}}_{Ax} 、 {\mathbf{F}}_{Ay} 、 {\mathbf{F}}_{Az} 和 {\mathbf{M}}_{Ax} 、 {\mathbf{M}}_{Ay} 、 {\mathbf{M}}_{Az} 表示,如图 17c 所示。这样的约束称为空间固定端约束。
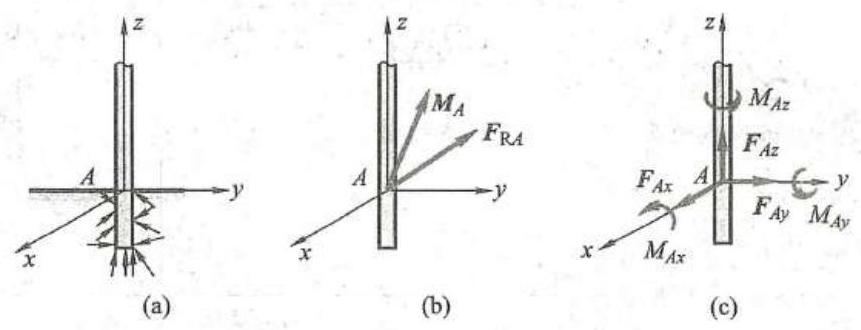
图 17
3.4.2 空间约束类型举例
一般情况下, 当刚体受到空间任意力系作用时, 在每个约束处, 其约束力的未知量可能有 1 个到 6 个。决定每种约束的约束力未知量个数的基本方法是: 观察被约束物体在空间可能的 6 种独立的位移中 (沿 x\text{、}y\text{、}z 三轴的移动和绕此三轴的转动),有哪几种位移被约束所阻碍。阻碍移动的是约束力,阻碍转动的是约束力偶。现将几种常见的空间约束类型及其约束力综合列表, 如表 1 所示。
表 1 几种常见的空间约束类型及其约束力
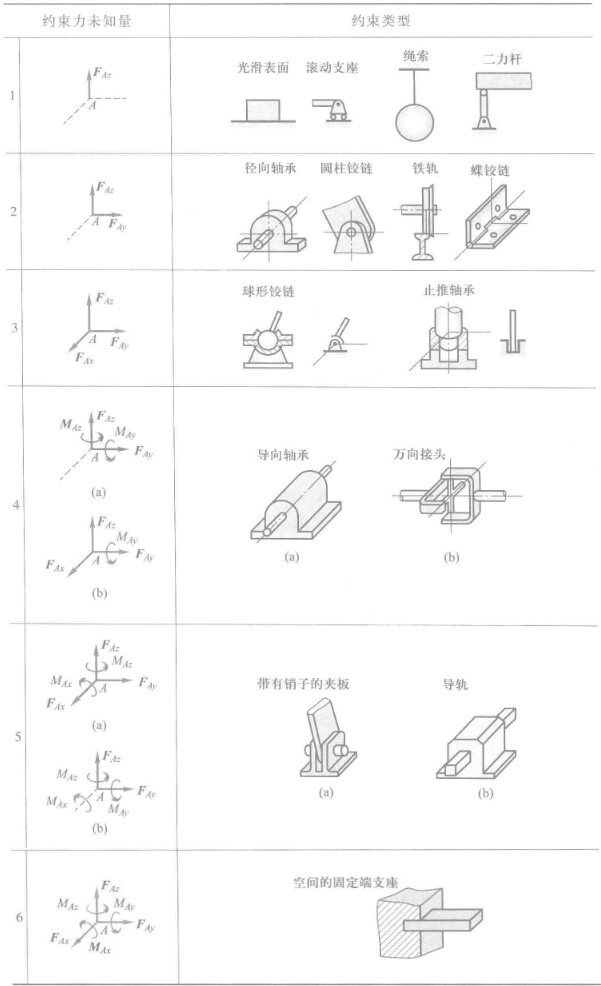
分析实际的约束时, 有时要忽略一些次要因素, 抓住主要因素, 做一些合理的简化。例如,导向轴承能阻碍轴沿 y 轴和 z 轴的移动,并能阻碍绕 y 轴和 z 轴的转动,因此有 4 个约束力 {\mathbf{F}}_{Ay} 和 {\mathbf{F}}_{Az},{\mathbf{M}}_{Ay} 和 {\mathbf{M}}_{Az} ; 而向心轴承限制轴绕 y 轴和 z 轴的转动作用很小,故 {M}_{Ay} 和 {M}_{Az} 可忽略不计,因此只有两个约束力 {F}_{Ay} 和 {F}_{Az} ; 又如,一般柜门都装有两个合页,形如表 1 中的蝶铰链,它主要限制物体沿 y 轴和 z 轴方向的移动,因而有两个约束力 {\mathbf{F}}_{Ay} 和 {\mathbf{F}}_{Az} 。合页不限制物体绕转轴的转动,单个合页对物体绕 y 轴和 z 轴转动的限制作用也很小,因而没有约束力偶。而当物体受到沿合页轴向作用力时,其中一个合页将限制物体轴向移动,应视为止推轴承。
如果刚体只受平面力系作用, 则垂直于该平面的约束力和绕平面内两轴的约束力偶都应为零,相应减少了约束力的数目。例如,在空间任意力系作用下,固定端的约束力共有 6 个,即 {\mathbf{F}}_{Ax}\text{、}{\mathbf{F}}_{Ay}\text{、}{\mathbf{F}}_{Az}\text{、}{\mathbf{M}}_{Ax}\text{、}{\mathbf{M}}_{Ay}\text{、}{\mathbf{M}}_{Az} ; 而在 {Oyz} 平面内受平面任意力系作用时,固定端的约束力就只有 3 个,即 {\mathbf{F}}_{Ax}\text{、}{\mathbf{F}}_{Ay} 和 {\mathbf{M}}_{Az} 。
3.4.3 空间任意力系的简化结果分析
空间任意力系向一点简化可能出现下列 4 种情况,即
(1) {\mathbf{F}}_{\mathrm{R}}^{\prime } = \mathbf{0},{\mathbf{M}}_{0} \neq \mathbf{0} ;
(2) {F}_{\mathrm{R}}^{\prime } \neq 0,{M}_{0} = 0 ;
(3) {F}_{\mathrm{R}}^{\prime } \neq 0,{M}_{0} \neq 0 ;
(4) {F}_{\mathrm{R}}^{\prime } = 0,{M}_{0} = 0 。
(1)空间任意力系简化为一合力偶的情形
当空间任意力系向任一点简化时,若主矢 {F}_{\mathrm{R}}^{\prime } = \mathbf{0} ,主矩 {M}_{0} \neq \mathbf{0} ,这时为一力偶。 显然, 该力偶与原力系等效, 此力偶称为原力系的合力偶, 合力偶矩矢等于原力系对简化中心的主矩。由于力偶矩矢与矩心位置无关, 因此, 在这种情况下, 主矩与简化中心的位置无关。
(2)空间任意力系简化为一合力的情形 · 合力矩定理
当空间任意力系向任一点简化时,若主矢 {\mathbf{F}}_{\mathrm{R}}^{\prime } \neq \mathbf{0} ,而主矩 {\mathbf{M}}_{0} = \mathbf{0} ,这时为一力。 显然,该力与原力系等效,即原力系合成为一合力,合力的作用线通过简化中心 O , 其大小和方向等于原力系的主矢。
若空间任意力系向任一点简化的结果为主矢 {\mathbf{F}}_{\mathrm{R}}^{\prime } \neq \mathbf{0} ,又主矩 {\mathbf{M}}_{0} \neq \mathbf{0} ,且 {\mathbf{F}}_{\mathrm{R}}^{\prime } \bot {M}_{0} ,如图 18a 所示。这时,力 {\mathbf{F}}_{\mathrm{R}}^{\prime } 和力偶矩矢为 {\mathbf{M}}_{0} 的力偶 \left( {{\mathbf{F}}_{\mathrm{R}}^{\prime \prime },{\mathbf{F}}_{\mathrm{R}}}\right) 在同一平面内,如图 18b 所示,如平面任意力系简化那样,可将力 {\mathbf{F}}_{\mathrm{R}}^{\prime } 与力偶 \left( {{\mathbf{F}}_{\mathrm{R}}^{\prime \prime },{\mathbf{F}}_{\mathrm{R}}}\right) 进一步简化,得作用于点 {O}^{\prime } 的一个力 {F}_{\mathrm{R}} ,如图 18c 所示。此力即为原力系的合力,其大
小和方向等于原力系的主矢,其作用线离简化中心 O 的距离为
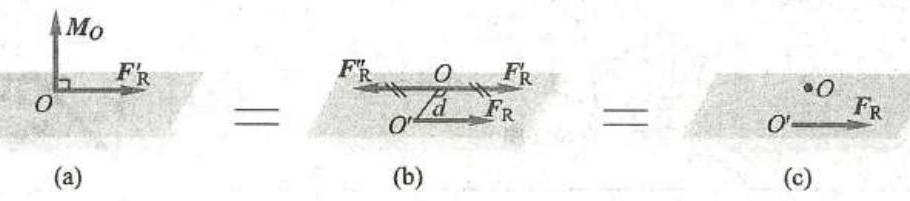
图 18
由图 18c 可知,合力 {\mathbf{F}}_{\mathrm{R}} 对点 O 的力矩矢 {\mathbf{M}}_{0} ,等于图 18a 中的主矩 {M}_{o} ,即
即空间任意力系的合力对于任一点的力矩矢等于各分力对同一点的力矩矢的矢量和。这就是空间任意力系的合力矩定理。再由空间力对点的矩与力对轴的矩的关系,得空间任意力系的合力对于任一轴的矩等于各分力对同一轴的矩的代数和。
(3)空间任意力系简化为力螺旋的情形
如果空间任意力系向一点简化后,主矢和主矩都不等于零,且 {\mathbf{F}}_{\mathrm{R}}^{\prime }//{\mathbf{M}}_{0} ,这种结果被称为力螺旋,如图 19 所示。所谓力螺旋是由一力和一力偶组成的力系, 其中力的作用线垂直于力偶的作用面。例如, 钻孔时的钻头对工件的作用, 以及拧螺钉时螺丝刀对螺钉的作用都是力螺旋。
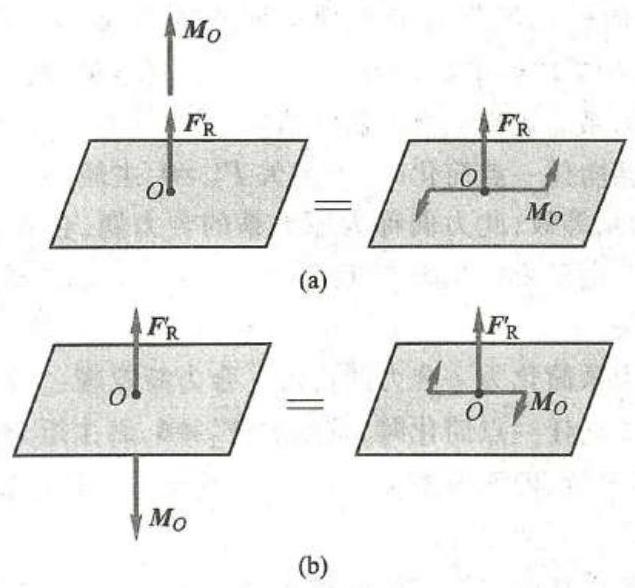
图 19
力螺旋是由静力学的两个基本要素力和力偶组成的最简单的力系,不能再进一步合成。力偶的转向和力的指向符合右手螺旋法则的称为右螺旋 (图 19a), 否则称为左螺旋 (图 19b)。力螺旋的力作用线称为该力螺旋的中心轴。在上述情形下, 中心轴通过简化中心。
如果 {\mathbf{F}}_{\mathrm{R}}^{\prime } \neq \mathbf{0},{\mathbf{M}}_{0} \neq \mathbf{0} ,且两者既不平行,又不垂直,如图 20a 所示。此时可将 {M}_{0} 分解为两个分力偶矩矢 {M}_{0}^{\prime } 与 {M}_{0}^{\prime \prime } ,它们分别平行于 {F}_{\mathrm{R}}^{\prime } 和垂直于 {F}_{\mathrm{R}}^{\prime } ,如图 20b 所示,则 {M}_{0}^{\prime \prime } 和 {F}_{\mathrm{R}}^{\prime } 可用作用于点 {O}^{\prime } 的力 {F}_{\mathrm{R}} 来代替。由于力偶矩矢是自由矢量,故可将 {\mathbf{M}}_{o}^{\prime } 平行移动,使之与 {\mathbf{F}}_{\mathrm{R}} 共线。这样便得一力螺旋,其中心轴不在简化中心 O ,而是通过另一点 {O}^{\prime } ,如图 20c 所示。 O 和 {O}^{\prime } 两点间的距离为
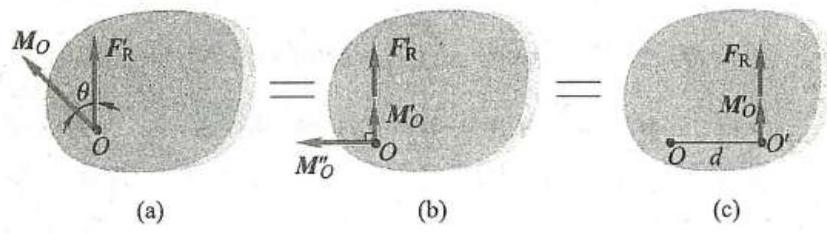
图 20
(4)空间任意力系简化为平衡力系的情形
当空间任意力系向任一点简化时,若主矢 {\mathbf{F}}_{\mathrm{R}}^{\prime } = \mathbf{0} ,主矩 {\mathbf{M}}_{0} = \mathbf{0} ,力系和零力系等效,空间任意力系平衡。
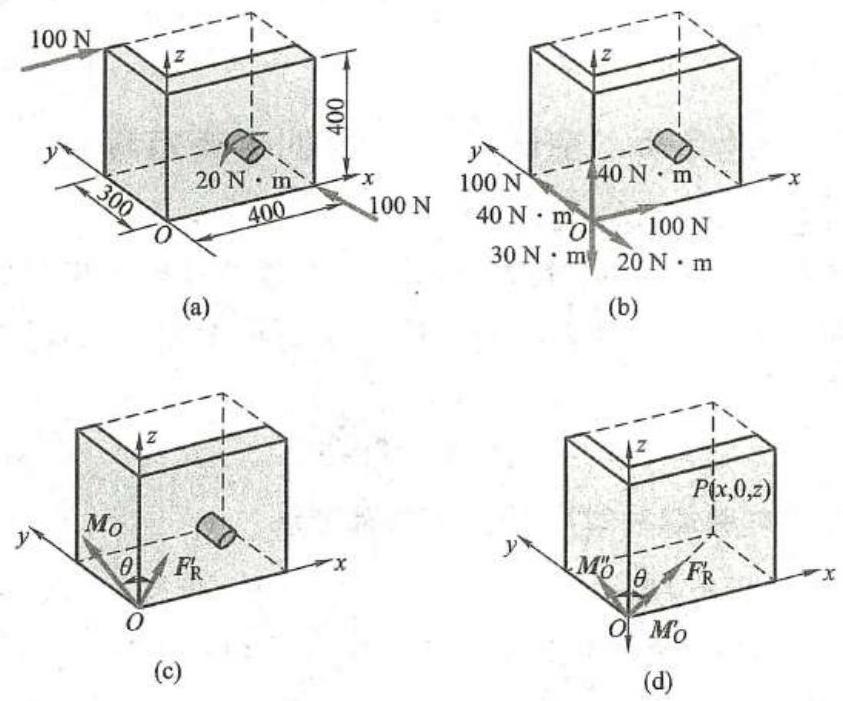
例 5 图 21a 所示空间力系可简化为一力螺旋。试求力螺旋中力偶的力偶矩矢及力作用线与 {Oxz} 平面交点 P 的坐标。
图 21
解:(1)先用力的平移定理,将力系向点 O 简化,求得其主矢 {F}_{\mathrm{R}}^{\prime } 和主矩 {M}_{O} ,皆用投影表示, 如图 21b 所示, 则有
{\mathbf{F}}_{\mathrm{R}}^{\prime } = \left( {{100}\mathbf{i} + {100}\mathbf{j}}\right) \mathrm{N}{M}_{0} = \left( {{20j} + {10k}}\right) \mathrm{N} \cdot \mathrm{m}可见将主矢和主矩均用合矢量表示,二者之间的夹角为 \theta ,如图 21c 所示。根据矢积的意义, 有 {\mathbf{F}}_{\mathrm{R}}^{\prime } \cdot {\mathbf{M}}_{0} 或 {\mathbf{F}}_{\mathrm{R}}^{\prime } \times {\mathbf{M}}_{0} 皆不为零,因此主矢和主矩既不垂直也不平行,可以简化为一力螺旋。
\left| {{\mathbf{F}}_{\mathrm{R}}^{\prime } \times {\mathbf{M}}_{0}}\right| = \left| {\mathbf{F}}_{\mathrm{R}}^{\prime }\right| \cdot \left| {\mathbf{M}}_{0}\right| \sin \theta得 \sin \theta = \sqrt{\frac{3}{5}},\cos \theta = \sqrt{\frac{2}{5}} 。
将主矩 {\mathbf{M}}_{0} 进行分解,得到平行于主矢的分量 {\mathbf{M}}_{0}^{\prime } 和垂直于主矢的分量 {\mathbf{M}}_{0}^{\prime \prime } ,如图 21d 所示,二者分别为
{M}_{0}^{\prime } = \left| {M}_{0}\right| \cos \theta \cdot \frac{{F}_{\mathrm{R}}^{\prime }}{\left| {F}_{\mathrm{R}}^{\prime }\right| } = \left( {{10i} + {10j}}\right) \mathrm{N} \cdot \mathrm{m}{M}_{o}^{\prime \prime } = {M}_{o} - {M}_{o}^{\prime } = \left( {-{10i} + {10j} + {10k}}\right) \mathrm{N} \cdot \mathrm{m} \tag{a}显然有 {F}_{\mathrm{R}}^{\prime } \cdot {M}_{o}^{\prime \prime } = 0 ,因此 {M}_{o}^{\prime \prime } 与主矢垂直,可以继续简化得到一力螺旋,其中力偶的力偶矩矢为 {\mathbf{M}}_{o}^{\prime } 。
(2)假设点 P 为主矢平移后使得 {\mathbf{M}}_{0}^{\prime \prime } = \mathbf{0} 时的作用线与 {Oxz} 平面的交点,亦即最后的力螺旋的中心轴与该平面的交点,设点 P 的坐标为(x,0, z),如图 21d 所示。根据空间力对点的力矩的计算公式,记点 O 到点 P 的矢径为 r ,则平移后的主矢 {F}_{\mathrm{R}}^{\prime } 对点 O 的力矩矢 (也就是 {M}_{0}^{\prime \prime } ) 为
{\mathbf{M}}_{o}^{\prime \prime } = \mathbf{r} \times {\mathbf{F}}_{\mathrm{R}}^{\prime } = \left| \begin{matrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ x & 0 & z \\ {100}\mathrm{\;N} & {100}\mathrm{\;N} & 0 \end{matrix}\right| = - {100}\mathrm{\;N} \cdot z\mathbf{i} + {100}\mathrm{\;N} \cdot z\mathbf{j} + {100}\mathrm{\;N} \cdot x\mathbf{k} \tag{b}由式 (a) 式 (b) 两式相等得到 x = {0.1}\mathrm{\;m}, z = {0.1}\mathrm{\;m} ,统一成图示单位,得点 P 的坐标为 ({100}\mathrm{\;{mm}},0 , {100}\mathrm{\;{mm}} )。
5 空间任意力系的平衡方程
5.1 空间任意力系的平衡方程
由上节知,当主矢 {\mathbf{F}}_{\mathrm{R}}^{\prime } = \mathbf{0} ,主矩 {\mathbf{M}}_{0} = \mathbf{0} ,力系和零力系等效,空间任意力系平衡, 由此可得空间任意力系处于平衡的必要和充分条件是: 该力系的主矢和对于任一点的主矩都等于零。即
根据式 (20) 和式 (22), 可将上述条件写为
式(27)称为空间任意力系的平衡方程。即空间任意力系平衡的必要和充分条件是:所有各力在三个坐标轴中每一个轴上的投影的代数和等于零,各力对于每一个坐标轴的矩的代数和也等于零。
空间任意力系是最普遍的力系, 其平衡方程包含了其他力系的平衡规律, 从中可导出其他特殊情况的平衡方程, 例如, 空间平行力系、空间汇交力系和平面任意力系等。现以空间平行力系为例, 导出空间平行力系的平衡方程, 其他情况读者可自行推导。
空间任意力系的独立平衡方程有 6 个, 只能求解 6 个未知量,如果未知量多于 6 个,就是静不定问题。
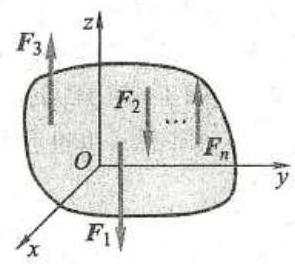
图 22
如图 22 所示,物体受一空间平行力系作用,设 z 轴与这些力平行,则各力对 z 轴的矩等于零。又由于 x 轴和 y 轴都与这些力垂直,各力在 x 轴和 y 轴上的投影也等于零。所以方程组 (27) 中, 第一、第二和第六个方程成了恒等式。因此, 空间平行力系只有 3 个平衡方程, 即
5.2 空间力系平衡问题举例
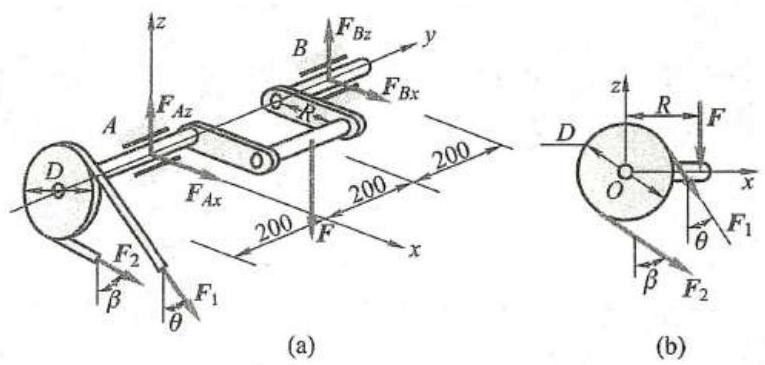
例 6 在图 23a 中,带的拉力 {F}_{2} = 2{F}_{1} ,曲柄上作用有铅垂力 F = {2000}\mathrm{\;N} 。带轮的直径 D = {400}\mathrm{\;{mm}} ,曲柄长 R = {300}\mathrm{\;{mm}} ,带 1 和带 2 与铅垂线间夹角分别为 \theta = {30}^{ \circ },\beta = {60}^{ \circ } (图 23b), 其他尺寸如图所示。求带的拉力和轴承约束力。
图 23
解:取整体为研究对象,受力如图 23a 所示。轴受空间任意力系作用,选坐标系如图所示, 列平衡方程:
\sum {F}_{x} = 0,\;{F}_{1}\sin {30}^{ \circ } + {F}_{2}\sin {60}^{ \circ } + {F}_{Ax} + {F}_{Bx} = 0\sum {F}_{y} = 0,\;0 = 0\sum {F}_{z} = 0,\; - {F}_{1}\cos {30}^{ \circ } - {F}_{2}\cos {60}^{ \circ } - F + {F}_{Az} + {F}_{Bz} = 0\sum {M}_{x}\left( F\right) = 0,\;{0.2}\mathrm{\;m} \cdot {F}_{1}\cos {30}^{ \circ } + {0.2}\mathrm{\;m} \cdot {F}_{2}\cos {60}^{ \circ } - {0.2}\mathrm{\;m} \cdot F + {0.4}\mathrm{\;m} \cdot {F}_{{B}_{2}} = 0\sum {M}_{y}\left( F\right) = 0,\;{0.3}\mathrm{\;m} \cdot F - {0.2}\mathrm{\;m} \cdot \left( {{F}_{2} - {F}_{1}}\right) = 0\sum {M}_{z}\left( F\right) = 0,\;{0.2}\mathrm{\;m} \cdot {F}_{1}\sin {30}^{ \circ } + {0.2}\mathrm{\;m} \cdot {F}_{2}\sin {60}^{ \circ } - {0.4}\mathrm{\;m} \cdot {F}_{Bx} = 0又有
{F}_{2} = 2{F}_{1}联立上述方程, 解得
{F}_{1} = {3000}\mathrm{\;N},\;{F}_{2} = {6000}\mathrm{\;N}{F}_{Ax} = - {10044}\mathrm{\;N},\;{F}_{Az} = {9397}\mathrm{\;N}{F}_{Bx} = {3348}\mathrm{\;N},\;{F}_{Bz} = - {1799}\mathrm{\;N}
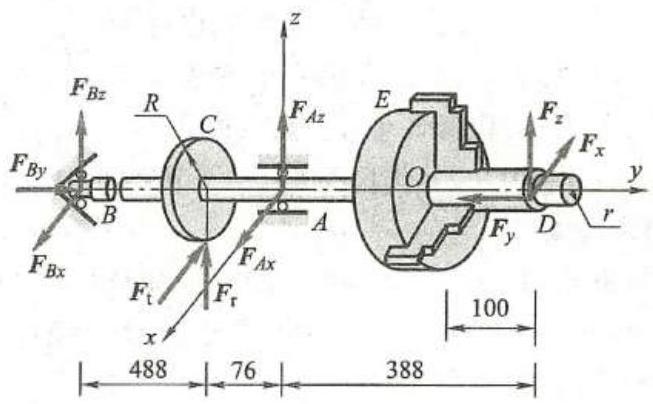
例 7 车床主轴如图 24 所示,已知车刀对工件的径向切削力 {F}_{x} = {4.25}\mathrm{{kN}} ,纵向切削力 {F}_{y} = {6.8}\mathrm{{kN}} ,主切削力 (切向) {F}_{z} = {17}\mathrm{{kN}} ,方向如图所示。 {F}_{1} 与 {F}_{\tau } 分别为作用在直齿轮 C 上的切向力和径向力,且 {F}_{\mathrm{r}} = {0.36}{F}_{1} 。齿轮 C 的节圆半径 R = {50}\mathrm{\;{mm}} ,被切削工件的半径 r = {30}\mathrm{\;{mm}} 。不考虑卡盘和工件等的自重,其余尺寸如图所示。系统处于平衡状态。求: (1) 齿轮啮合力 {\mathbf{F}}_{1} 与 {F}_{t} ; (2) 径向轴承 A 和止推轴承 B 的约束力; (3) 三爪卡盘 E 在 O 处对工件的约束力。 解:先取整体为研究对象,受力如图 24 所示,为一空间任意力系,选坐标系如图所示。 (1)求齿轮啮合力 {F}_{1} 与 {F}_{r} ,列平衡方程:
\sum {M}_{y} = 0,\;{F}_{1} \cdot R - {F}_{z} \cdot r = 0图 24
又
{F}_{\mathrm{r}} = {0.36}{F}_{1}解得
{F}_{\mathrm{t}} = {10.2}\mathrm{{kN}},\;{F}_{\mathrm{r}} = {3.67}\mathrm{{kN}}(2)求径向轴承 A 和止推轴承 B 的约束力,列平衡方程:
\sum {F}_{x} = 0,\;{F}_{Ax} + {F}_{Bx} - {F}_{1} - {F}_{x} = 0\sum {F}_{y} = 0,\;{F}_{By} - {F}_{y} = 0\sum {F}_{z} = 0,\;{F}_{Az} + {F}_{Bz} + {F}_{v} + {F}_{z} = 0\sum {M}_{x} = 0,\; - {F}_{Bz} \cdot \left( {{488} + {76}}\right) \mathrm{{mm}} - {F}_{\tau } \cdot {76}\mathrm{\;{mm}} + {F}_{z} \cdot {388}\mathrm{\;{mm}} = 0\sum {M}_{z} = 0,\;{F}_{Bx} \cdot \left( {{488} + {76}}\right) \mathrm{{mm}} - {F}_{1} \cdot {76}\mathrm{\;{mm}} - {F}_{y} \cdot {30}\mathrm{\;{mm}} + {F}_{x} \cdot {388}\mathrm{\;{mm}} = 0解得
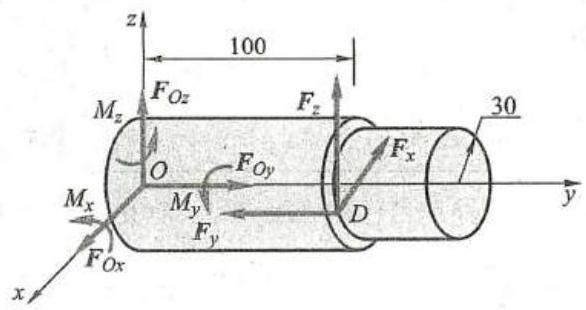
{F}_{Ax} = {15.64}\mathrm{{kN}},\;{F}_{Az} = - {31.87}\mathrm{{kN}}{F}_{Bx} = - {1.19}\mathrm{{kN}},\;{F}_{By} = {6.8}\mathrm{{kN}},\;{F}_{Bz} = {11.2}\mathrm{{kN}}(3)求三爪卡盘 E 在 O 处对工件的约束力。取工件,画出其受力图如图 25 所示。
\sum {F}_{x} = 0,\;{F}_{Ox} - {F}_{x} = 0\sum {F}_{y} = 0,\;{F}_{Oy} - {F}_{y} = 0\sum {F}_{z} = 0,\;{F}_{Oz} + {F}_{z} = 0\sum {M}_{x} = 0,\;{M}_{x} + {100}\mathrm{\;{mm}} \cdot {F}_{z} = 0\sum {M}_{y} = 0,\;{M}_{y} - {30}\mathrm{\;{mm}} \cdot {F}_{z} = 0\sum {M}_{z} = 0,\;{M}_{z} + {100}\mathrm{\;{mm}} \cdot {F}_{x} - {30}\mathrm{\;{mm}} \cdot {F}_{y} = 0图 25
解得
{F}_{{O}_{x}} = {4.25}\mathrm{{kN}},\;{F}_{{O}_{y}} = {6.8}\mathrm{{kN}},\;{F}_{{O}_{z}} = - {17}\mathrm{{kN}}{M}_{x} = - {1.7}\mathrm{{kN}} \cdot \mathrm{m},\;{M}_{y} = {0.51}\mathrm{{kN}} \cdot \mathrm{m},\;{M}_{z} = - {0.22}\mathrm{{kN}} \cdot \mathrm{m}
空间任意力系有 6 个独立的平衡方程, 可求解 6 个未知量。如同平面任意力系, 其平衡方程不局限于式 (27) 所示的一种形式。为使解题简便, 每个方程中最好只包含一个未知量。为此, 在选投影轴时应尽量与其余未知力垂直, 在选择取矩的轴时应尽量与其余的未知力平行或相交。投影轴不必相互垂直, 取矩的轴也不必与投影轴重合。空间任意力系的力矩方程的数目可取 3 个至 6 个。
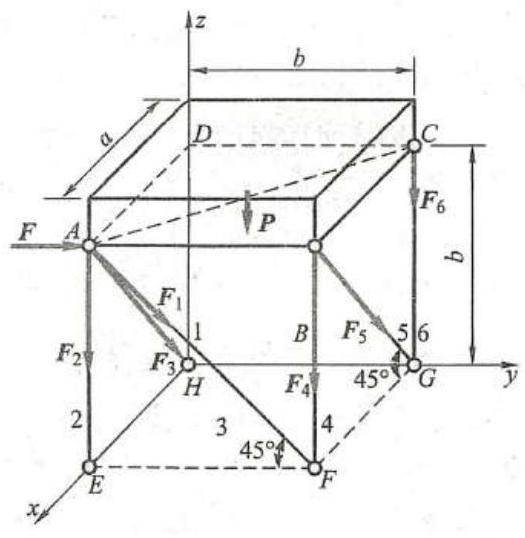
例 8 图 26 所示均质长方形板由 6 根直杆支持于水平位置, 直杆两端分别用球铰链与板和地面连接。板重为 P ,在 A 处作用一水平力 F ,力 F 平行于 y 轴,且 F = {2P} 。求 6 根杆的内力。
解: 取板为研究对象, 各支杆均为二力杆, 设它们均受拉力,板的受力图如图 26 所示。按列一个方程求一个未知数的原则, 列 6 个力矩平衡方程求解。力矩方程中 $M$ 的下标,第一个字母表示坐标轴的坐标原点, 第二个字母表示坐标轴的正向。图 26
\sum {M}_{EA} = 0,\;{F}_{5}\cos {45}^{ \circ } \cdot b = 0,\;\text{得}{F}_{5} = 0\sum {M}_{FB} = 0,\; - {F}_{1}\cos {45}^{ \circ } \cdot b = 0,\;\text{ 得 }\;{F}_{1} = 0\sum {M}_{AC} = 0,\;{F}_{4} \cdot \frac{ab}{\sqrt{{a}^{2} + {b}^{2}}} = 0,\;\text{ 得 }\;{F}_{4} = 0\sum {M}_{AB} = 0,\; - {F}_{6} \cdot a - P \cdot \frac{a}{2} = 0,\;\text{ 得 }\;{F}_{6} = - \frac{P}{2}\text{ (压力) }\sum {M}_{HD} = 0,\;{F}_{3}\cos {45}^{ \circ } \cdot a + F \cdot a = 0\text{,得}{F}_{3} = - 2\sqrt{2}P\text{(压力)}\sum {M}_{CB} = 0,\;{F}_{2} \cdot b + P \cdot \frac{b}{2} + {F}_{3}\sin {45}^{ \circ } \cdot b = 0\text{,得}{F}_{2} = {1.5P}\text{(拉力)}
6 物体的重心
6.1 平行力系中心
前面分析了力系向一点简化的最终结果, 可能为合力偶、合力、力螺旋和平衡力系四种情况。那么一个空间平行力系简化的最终结果是什么呢? 假设有一个空间平行力系 {\mathbf{F}}_{1},{\mathbf{F}}_{2},\cdots ,{\mathbf{F}}_{n} ,如图 27 所示。定义一个与各力平行的单位矢量 \mathbf{a} ,则平行力系可用该单位矢量表示成 {F}_{1}a,{F}_{2}a,\cdots ,{F}_{n}a 。现将该力系向空间中任意一点 O 简化,根据力系简化理论,将会得到一个主矢 {\mathbf{F}}_{\mathrm{R}}^{\prime } 和一个主矩 {\mathbf{M}}_{O} ,其中
表示主矢 {\mathbf{F}}_{\mathrm{R}}^{\prime } 与平行力系中各力平行,如图 27 所示。而主矩 {\mathbf{M}}_{0} 为各力对点 O 力矩矢的矢量和。从点 O 向各力的作用点引矢径 {\mathbf{r}}_{1},{\mathbf{r}}_{2},\cdots ,{\mathbf{r}}_{n} ,根据式 (7),得到主矩的计算式为
根据矢积的几何意义可知,主矩 {M}_{0} 垂直于单位矢量 \mathbf{a} ,亦即主矩 {M}_{0} 垂直于主矢 {\mathbf{F}}_{\mathrm{R}}^{\prime } ,如图 27 所示。这表明该力系还可以向另外一点继续简化得到一个合力 {\mathbf{F}}_{\mathrm{R}} 。前提是主矢 {\mathbf{F}}_{\mathrm{R}}^{\prime } 不等于零。因此可以得出结论: 如果空间平行力系的主矢不等于零, 则该力系一定可以简化得到一个合力。合力到当前简化中心 O 的距离为
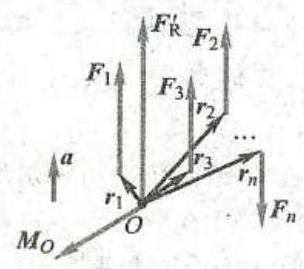
图 27
建立如图 28a 所示的坐标系,平行力系中各力的方向与 z 轴平行,设各力作用点的坐标分别为 \left( {{x}_{i},{y}_{i},{z}_{i}}\right) , i = 1,2,\cdots , n 。因为合力 {\mathbf{F}}_{\mathrm{R}} 与各力平行,所以合力 {\mathbf{F}}_{\mathrm{R}} 也与 z 轴平行,设其作用点为 C ,称之为平行力系中心。其坐标设为 \left( {{x}_{c},{y}_{c}}\right. , {z}_{c} ),此即为平行力系中心的坐标。根据合力矩定理,力系中各力对一点 (轴) 的力矩之和等于合力对同一点 (轴) 的矩, 因此合力对三根坐标轴的矩等于各力对三根坐标轴的力矩之和。分别对 x 轴和 y 轴应用合力矩定理,有
亦即
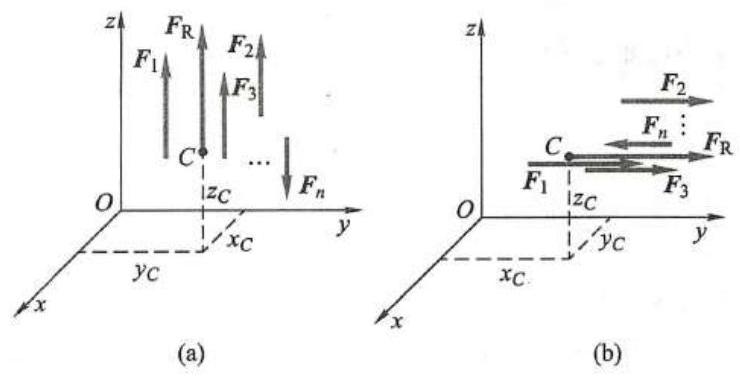
图 28
得到
同时将各力绕着作用点在平行于 {Oyz} 的平面内顺时针旋转 {90}^{ \circ } ,则合力也将在平行于 {Oyz} 的平面内顺时针旋转 {90}^{ \circ } ,且作用点保持不变,此时各力均与 y 轴平行, 如图 28b 所示。对 x 轴应用合力矩定理,有
得到
于是得到平行力系中心的坐标的计算公式为
由式 (29) 可见, 平行力系中心的坐标只与各力的大小及作用点有关, 而与平行力系的方向无关。这是关于空间平行力系的另外一个结论, 它是计算重心的基础。
式(29)还可以用一般的矢量表达式来推导。建立一个一般意义上的直角坐标系,设坐标原点 O 到平行力系中各力作用点的矢径分别为 {\mathbf{r}}_{i}\left( {i = 1,2,\cdots , n}\right) , 到合力 {\mathbf{F}}_{\mathrm{R}} 作用点 C (平行力系中心) 的矢径为 {\mathbf{r}}_{c} 。根据合力矩定理,平行力系中各力对点 O 的力矩矢的矢量和等于合力 {\mathbf{F}}_{\mathrm{R}} 对点 O 的力矩矢,也就是
考虑到合力 {\mathbf{F}}_{\mathrm{R}} = {\mathbf{F}}_{\mathrm{R}} \cdot \mathbf{a} ,于是上式可写成
得到
由此得到平行力系中心的矢径为
式 (30) 在各坐标轴上的投影即为式 (29), 也就是平行力系中心的直角坐标。
6.2 物体的重心
在地球表面附近的空间中, 任何物体的各个质点都受到铅垂向下的地球引力作用, 习惯称之为重力。
这些力严格说来组成一个空间汇交力系, 力系的汇交点在地球中心附近。但是, 工程中的物体尺寸都远较地球为小, 离地心又很远, 若把地球看作为球,可以算出,在地球表面一个长约 {31}\mathrm{\;m} 的物体,其两端重力之间的夹角不超过 1"。因此, 在工程中, 把物体各微小部分的重力视为空间平行力系是足够精确的。
物体各质点的重力组成一个空间平行力系, 此平行力系的合力的大小称为物体的重量,此平行力系的中心称为物体的重心,也即物体重力合力的作用点称为物体的重心。如果把物体看作刚体, 则此物体的重心相对物体本身来说是一个固定的点, 不因物体的放置方位而改变。
物体的重心是力学和工程中一个重要的概念, 在许多工程问题中, 物体重心的位置对物体的平衡或运动状态起着重要的作用。如起重机重心的位置若超出某一范围,起重机工作时就要出事故。高速旋转的轴及其上各部件的重心如不在转轴轴线上, 将引起剧烈振动而影响机器的寿命甚至发生事故。而飞机、轮船及车辆的重心位置对它们运动的稳定性和可操控性也有极大的关系。因此, 测定或计算物体重心的位置, 在工程中有着重要的意义。下面介绍几种常见的确 (测) 定或计算物体重心的方法。
- 对称确定法
对均质物体,若此物体具有几何对称面、对称轴或对称点,则此物体的重心必定在此对称面、对称轴或对称点上。这种确定物体重心的方法虽然简单,但是方便实用。此时,物体的重心也称为物体的形心(几何中心)。
- 实验测定法
工程中经常遇到形状复杂或非均质的物体, 此时其重心的位置可用实验方法确定。另外, 虽然设计时重心的位置计算得很精确, 但是由于在制造和装配时产生误差等原因, 待产品制成后, 其重心在不在设计的范围内, 也可以用实验的方法来进行重心的测定。下面介绍两种常用的实验方法。
(1)悬挂法
对于薄板形物体或具有对称面的薄零件,可将该物体悬挂于任一点 A ,如图 29a 所示。待平衡时,设法标出线段 {AB} ,据二力平衡条件,重心必在此线上。 再将该物体悬挂于任一点 D (图 29b),待平衡时,设法标出线段 {DE} ,则两线段的交点 C 就是该物体的重心。
(2)称重法
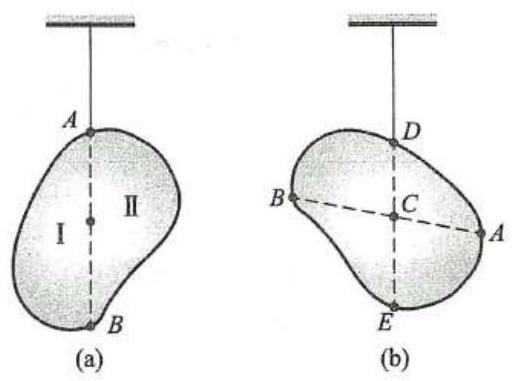
图 29
对于形状复杂、体积庞大的物体或由许多零部件构成的物体系, 常用称重法测定重心的位置。下面以汽车为例, 说明测定重心的称重法。
首先称量出汽车的重量 P ,测量出汽车前后轮距 l 和车轮半径 r 。汽车重心为一个点, 为确定其位置, 需要 3 个参数, 如离前 (或后) 轮的距离、距地面的高度和离左 (或右)轮的距离。确定了这 3 个参数, 则汽车重心的位置就已确定。
现在先测定汽车重心离后轮的距离,设为 {x}_{c} 。为了测定 {x}_{c} ,将汽车后轮放在地面上,前轮放在磅秤上,车身保持水平,如图 30a 所示。读出磅秤上的读数,设以 {F}_{1} 表示。设汽车后轮与地面接触点为点 A ,因系统是平衡的,由 \sum {M}_{A} = 0 ,有
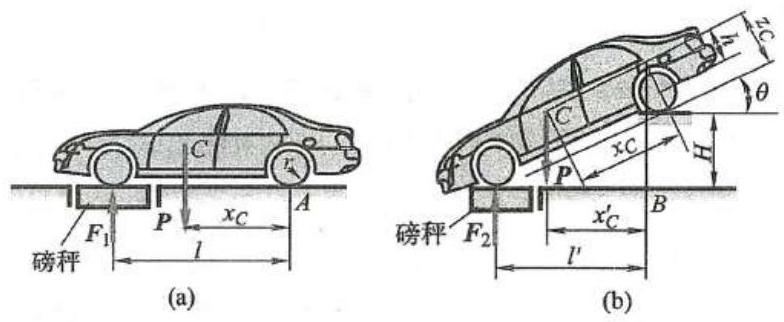
图 30
得
再测定汽车重心离地面的高度,设为 {z}_{c} 。欲测定 {z}_{c} ,将车后轮抬到适当高度 H ,如图 30b 所示。读出磅秤上的读数,设以 {F}_{2} 表示。因系统是平衡的,由 \sum {M}_{B} = 0 ,有
得到
由图中的几何关系知
整理以后得
式中等号右边均为已测定的数据。
- 解析计算法
重心是物体在空间的一个点, 在空间中确定一个点需要 3 个坐标。下面给出在坐标系下计算物体重心坐标的公式, 称这种方法为解析计算法。对固体来说, 重心有确定的位置, 与物体在空间的位置无关。
(1)有限分割法
设物体由若干部分组成,第 i 部分的重量为 {P}_{i} ,其重心坐标为 \left( {{x}_{i},{y}_{i},{z}_{i}}\right) ,则由式(30)得计算物体重心坐标的公式为
考虑到 {P}_{i} = {m}_{i}g, P = {mg} ,式中 g 为重力加速度, {m}_{i} 为微体的质量, m 为物体的质量,代入式(31),得到计算物体重心(质心)的坐标公式为
如果物体是均质的,又有 {m}_{i} = {V}_{i}\rho , m = {V}_{\rho } ,式中 \rho 为物体的密度, {V}_{i} 为微体的体积, V 为物体的体积,代入式 (31),又得到计算物体重心 (形心) 的坐标公式为
如果物体为等厚均质板或薄壳,又有 {V}_{i} = {A}_{i}h, V = {Ah} ,式中 h 为板或壳的厚度, {A}_{i} 为微体的面积, A 为物体的面积,又有计算物体重心 (形心) 的坐标公式为
举例说明有限分割法的应用。
例 9 图示为一等厚度均质 \mathrm{Z} 形板,其尺寸如图 31 所示,求其重心位置。
解: 用有限分割法,将该图形分割为三个矩形 (例如用 {ab} 和 {cd} 两线分割),则每个矩形的面积和其重心位置为已知,用式 (34) 计算即可。以 {C}_{1}\text{、}{C}_{2}\text{、}{C}_{3} 分别表示这三个矩形的重心,以 {A}_{1} 、 {A}_{2} 、 {A}_{3} 分别表示其面积,则三个矩形的面积和其重心 {C}_{1} 、 {C}_{2} 、 {C}_{3} 的坐标分别为
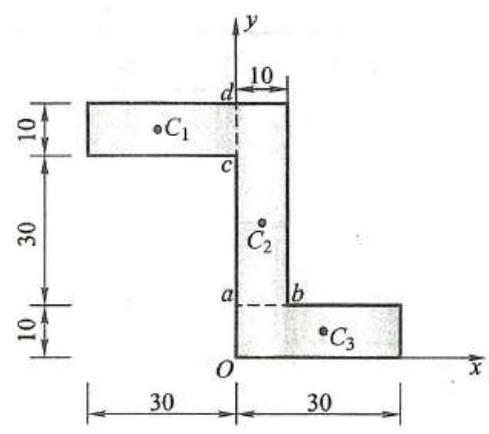
图 31
由公式
计算后得
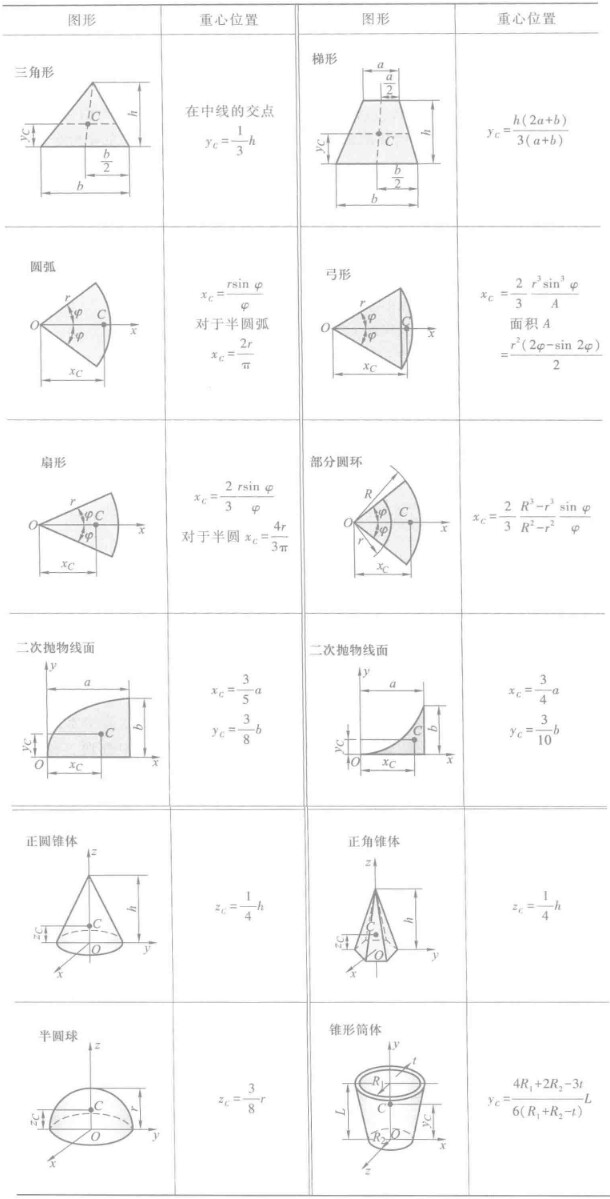
在实际应用中, 许多物体重心的位置可从工程手册上查到, 工程中常用的型钢 (如工字钢、角钢、槽钢等)截面的重(形)心,也可以从型钢规格表中查到。表 2 列出了几种常见的简单均质几何形体及其重心位置。
表 2 简单均质几何形体及其重心位置
(2)负重量(体积、面积)法
在实际问题中常常要在物体内切(挖)去一部分,例如,要开些孔或槽、挖有空穴等,对这类物体的重心,也可按有限分割法计算。但区别是,先按没有这些孔、 槽、空穴用有限分割法来计算, 再把这些孔、槽、空穴去掉。计算时, 把这些孔、槽、 空穴的重量、体积或面积取为负值,作为额外部分按有限分割法公式计算即可。一般称此方法为负重量 (体积、面积) 法。
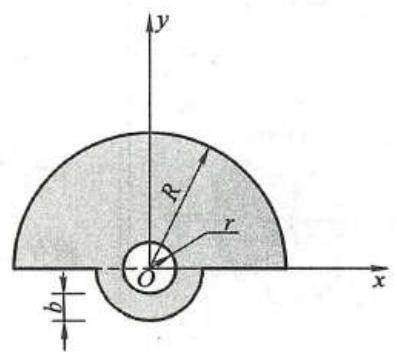
图 32
举例说明负面积法的应用。
例 10 求图 32 所示振动沉桩器中的偏心块的重心。已知 R = {100}\mathrm{\;{mm}}, r = {17}\mathrm{\;{mm}}, b = {13}\mathrm{\;{mm}} 。
解: 将偏心块看成是由三部分组成,即半径为 R 的半圆,半径为 r + b 的半圆和半径为 r 的小圆。因为半径为 r 的小圆是切去的部分, 所以面积应取负值。建立坐标系如图所示,则有 {x}_{c} = 0 。设 {y}_{1}\text{、}{y}_{2}\text{、}{y}_{3} 分别是三部分重心的坐标,查表 2 ,可知
{y}_{1} = \frac{4R}{3\pi },\;{y}_{2} = - \frac{4\left( {r + b}\right) }{3\pi },\;{y}_{3} = 0而
{A}_{1} = \frac{\pi }{2}{R}^{2},\;{A}_{2} = \frac{\pi }{2}{\left( r + b\right) }^{2},\;{A}_{3} = - \pi {r}^{2}于是, 偏心块重心的坐标为
{y}_{c} = \frac{{A}_{1}{y}_{1} + {A}_{2}{y}_{2} + {A}_{3}{y}_{3}}{{A}_{1} + {A}_{2} + {A}_{3}}计算可得
{y}_{c} = {40.01}\mathrm{\;{mm}}