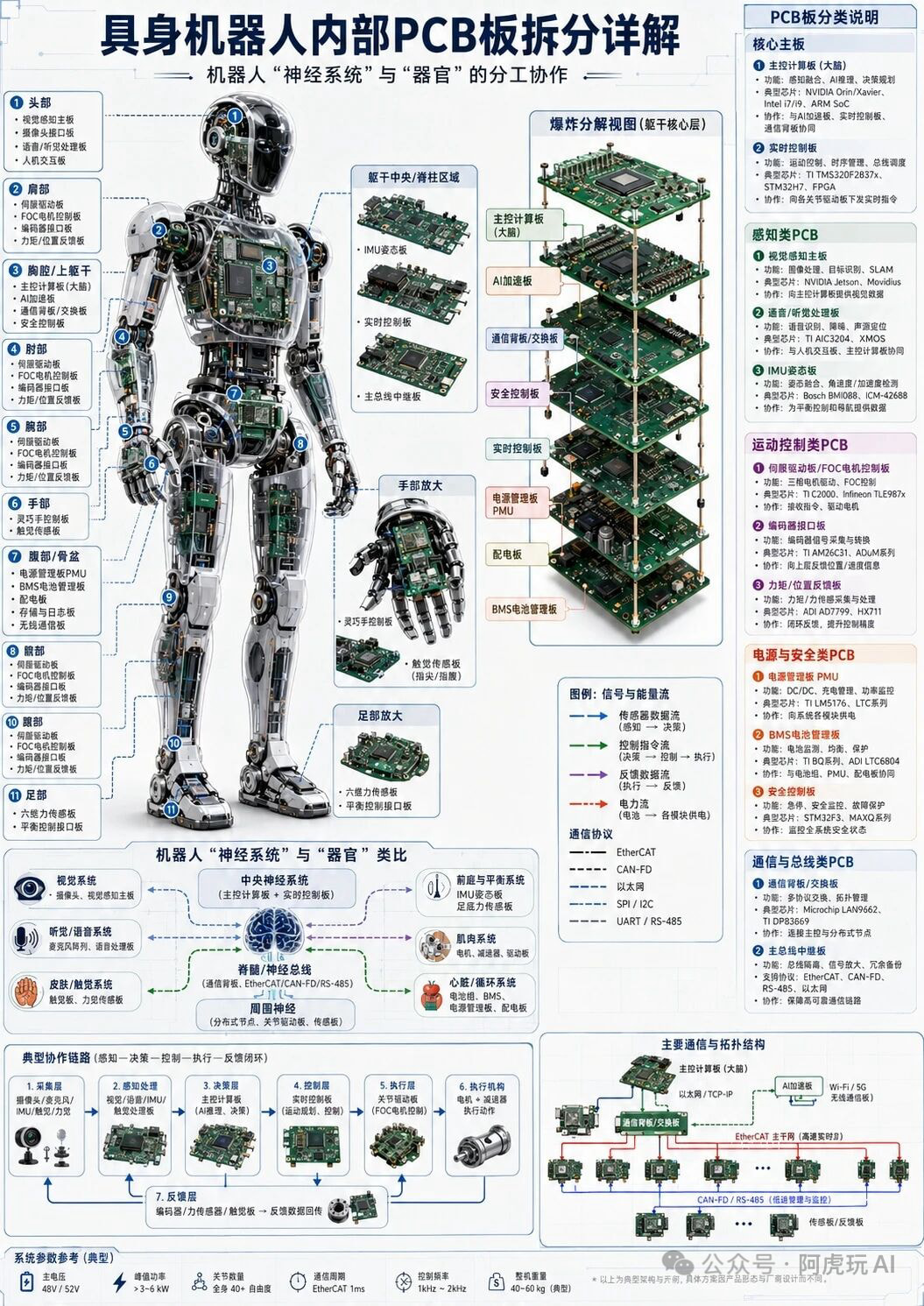
机器人的结构设计可以拆解为以下几个核心子系统:
核心驱动与传动系统 (Actuation & Transmission)
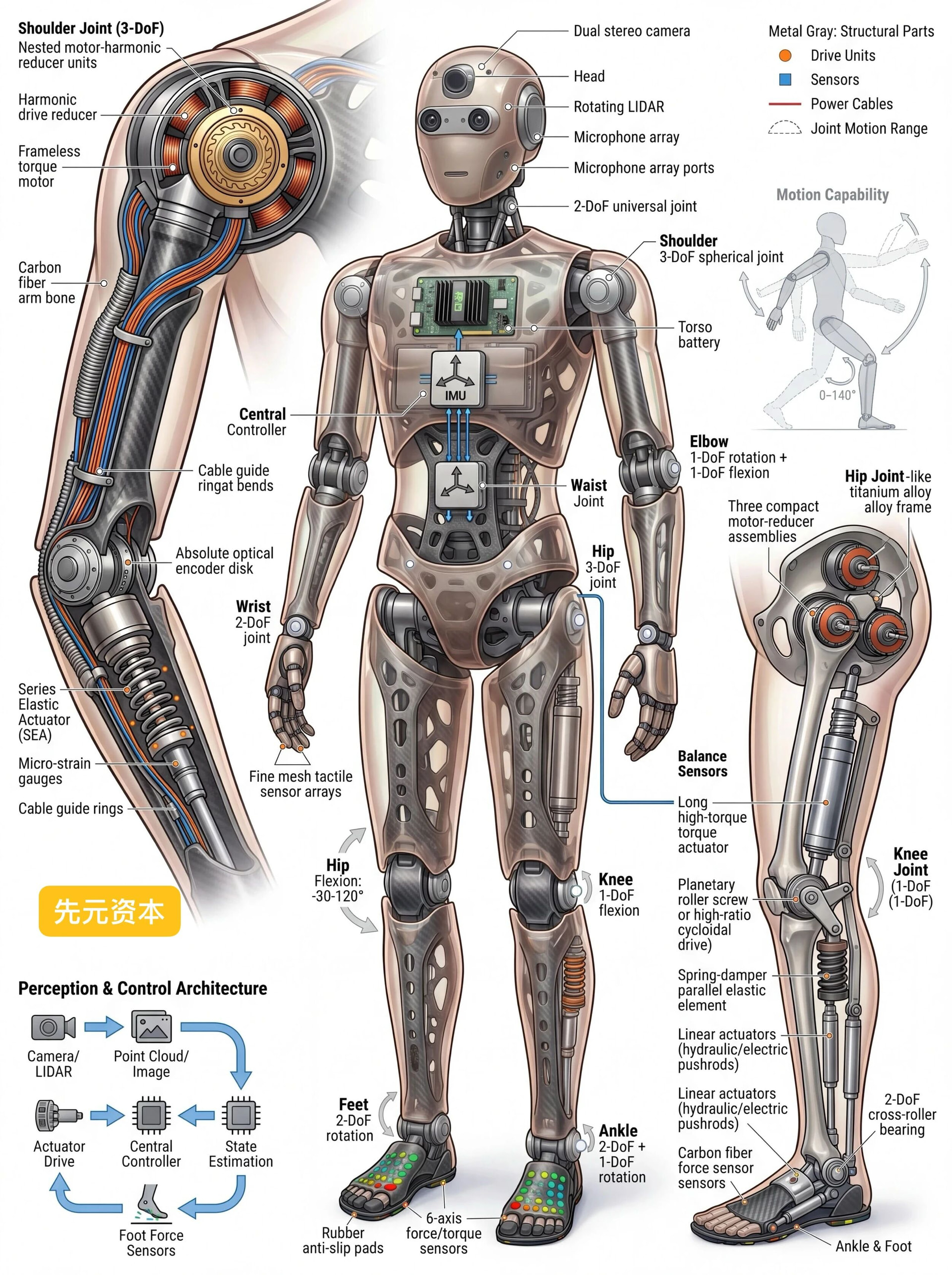
该机器人在不同关节处采用了针对性优化的驱动方案,以平衡扭矩、精度和体积:
- 旋转关节(如肩部 3-DoF、髋部 3-DoF):采用了无框力矩电机(Frameless torque motor)与谐波减速器(Harmonic drive reducer)的嵌套组合。这种设计在保证高扭矩密度的同时,实现了极低的背隙和高精度的运动控制。
- 手臂与柔性驱动:手臂部分集成了串联弹性驱动器 (SEA, Series Elastic Actuator)。SEA 通过在电机和负载之间引入弹性元件,不仅能吸收冲击保护硬件,还能实现高精度的力矩控制和顺应性(Compliance),这对于人机交互至关重要。
- 下肢大出力关节(如膝关节 1-DoF):采用了直线驱动器 (Linear actuators),包含行星滚柱丝杠(Planetary roller screw)或高减速比摆线针轮,并配有弹簧阻尼并联弹性元件。这种推杆结构能提供支撑躯干行走所需的巨大轴向推力,同时具备一定的仿生减震能力。
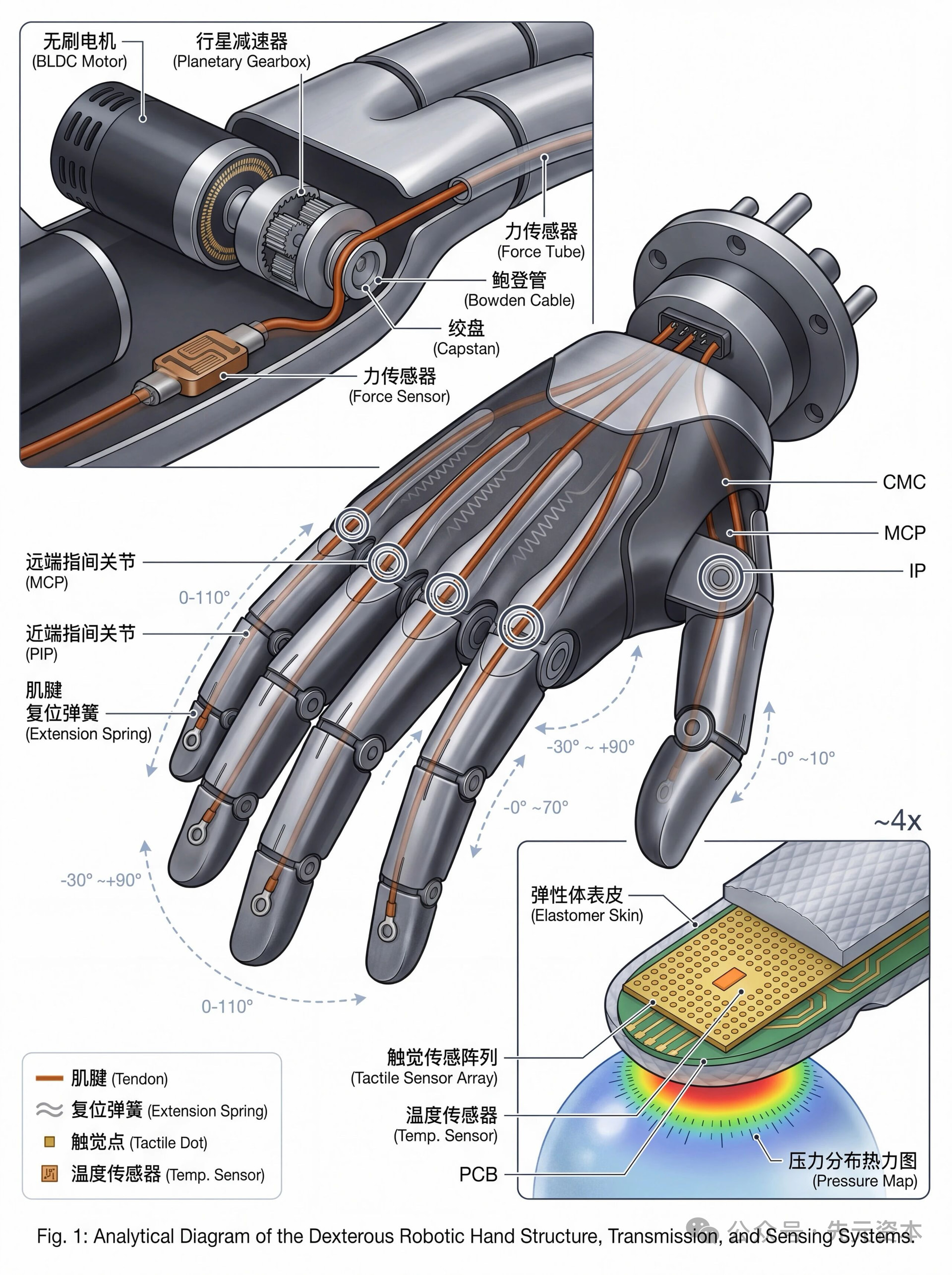
巧手设计 (Dexterous Hand)
手部结构(图 1)是高度集成的腱绳驱动(Tendon-driven)仿生系统:
- 线驱传动:将无刷直流电机(BLDC Motor)与行星减速器(Planetary Gearbox)置于手臂或手腕后方,通过鲍登管(Bowden Cable)和绞盘(Capstan)将动力远距离传递至手指关节 。这种设计大幅减轻了手指末端的惯量,使手部动作更加敏捷。
- 仿生关节与复位:包含远端指间关节(DIP/IP)、近端指间关节(PIP)和掌指关节(MCP)。手指弯曲依靠线缆拉力,而伸展复位则巧妙地利用了肌腱复位弹簧(Extension Spring),简化了控制逻辑并减少了驱动器数量。
- 末端感知:指尖覆盖有弹性体表皮(Elastomer Skin),内部封装了高密度的触觉传感阵列(Tactile Sensor Array)和温度传感器,能够生成高分辨率的压力分布热力图,为精密抓取和材质识别提供多维数据。
传感与多模态感知系统 (Perception & Sensors)
该机器人具备从宏观环境导航到微观力控的全方位感知能力:
- 头部环境感知:搭载了双目立体相机(Dual stereo camera)、旋转激光雷达(Rotating LIDAR)以及麦克风阵列,形成 3D 视觉、深度点云与听觉的多模态输入,用于SLAM建图、避障和交互。
- 本体状态与力控感知:
- 躯干内置 IMU(惯性测量单元),用于平衡与姿态解算。
- 关节处配有绝对值光电编码器(Absolute optical encoder disk)记录绝对位置 [file:2]。
- 传动链路中串联了微应变片(Micro-strain gauges)和力传感器(Force Sensor)实现闭环力控。
- 足底配备了 6轴力/力矩传感器(6-axis force/torque sensors),用于精准感知地面反作用力(ZMP控制),这是实现双足稳定行走的核心。
骨骼材料与控制架构 (Structure & Control)
- 轻量化骨架:手臂及部分受力结构采用了碳纤维(Carbon fiber arm bone),髋关节等高承载部位使用了钛合金骨架(Titanium alloy frame)。这在保证结构强度的同时,极大降低了整体质量,提高了续航和动态响应能力。
- 软硬件控制闭环:架构图显示其采用了经典的“感知-决策-执行”逻辑。相机/雷达采集图像和点云,输入给中央控制器(Central Controller)进行状态估计和决策,随后输出指令给驱动器(Actuator Drive),同时结合足底力传感器等底层反馈进行高频的实时姿态修正。