对于由 n 个质点组成的质点系,可以列出 {3n} 个运动微分方程进行动力学分析,但其求解会很复杂,而且也没有必要,因为一般需要的是质点系的某些整体的运动特征。
动量定理、动量矩定理和动能定理从不同的侧面揭示了质点和质点系整体的运动变化与作用量之间的关系,可用以求解质点系动力学问题。动量定理、 动量矩定理和动能定理统称为动力学普遍定理。
1 动量与冲量
1.1 动量
物体之间往往有机械运动的相互传递,在传递机械运动时产生的相互作用力不仅与物体的速度变化有关,而且与它们的质量有关。例如,枪弹质量虽小,但速度很大,击中目标时,产生很大的冲击力;轮船靠岸时,速度虽小,但质量很大,操纵稍有疏忽,足以将船撞坏。据此,可以用质点的质量与速度的乘积,来表征质点的这种运动量。
质点的质量与速度的乘积称为质点的动量,记为 m\mathbf{v} 。质点的动量是矢量,它的方向与质点速度的方向一致。
在国际单位制中,动量的单位为 \mathrm{{kg}} \cdot \mathrm{m}/\mathrm{s} 。
质点系内各质点动量的矢量和称为质点系的动量,即
式中,n 为质点系内的质点数,{m}_{i} 为第 i 个质点的质量,{v}_{i} 为该质点的速度。质点系的动量是矢量。
如质点系中任一质点 i 的矢径为 {\mathbf{r}}_{i} ,则其速度为 {\mathbf{v}}_{i} = \frac{\mathrm{d}{\mathbf{r}}_{i}}{\mathrm{\;d}t} ,代入式(1),注意到质量 {m}_{i} 是不变的,则有
令 m = \sum {m}_{i} 为质点系的总质量,与重心坐标相似,定义质点系质量中心 (简称质心) C 的矢径为
代入前式,得
其中,{v}_{c} = \frac{\mathrm{d}{r}_{c}}{\mathrm{\;d}t} 为质点系质心 C 的速度。式(3)表明,质点系的动量等于质心速度与其全部质量的乘积。这表明质点系的动量是描述质心运动的一个物理量。
刚体是由无限多个质点组成的不变质点系,质心是刚体内某一确定点 (这一点也可能在刚体外部)。对于质量均匀分布的规则刚体,质心就是几何中心,用式 (3)计算刚体的动量是非常方便的。例如,长为 l 、质量为 m 的均质细杆,在平面内绕点 O 转动,角速度为 \omega ,如图 1a 所示。细杆质心的速度 {v}_{c} = \frac{l}{2}\omega ,则细杆的动量大小为 m\frac{l}{2}\omega ,方向与 {v}_{c} 相同。又如图1b所示的均质滚轮,质量为 m ,轮心速度为 {v}_{c} ,则其动量为 m{v}_{c} 。而如图1c所示的绕中心转动的均质轮,无论有多大的角速度和质量,由于其质心不动,其动量总是零。
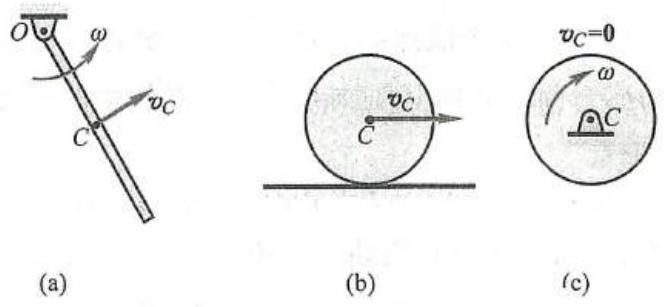
图 1
1.2 冲量
物体在力的作用下引起的运动变化,不仅与力的大小和方向有关,还与力作用时间的长短有关。例如,人力推动车厢沿铁轨运动,经过一段时间,可使车厢得到一定的速度;如改用机车牵引车厢,只需很短的时间便能达到同样的速度。如果作用力是常量,我们用力与作用时间的乘积来衡量力在这段时间内积累的作用效果。作用力与作用时间的乘积称为常力的冲量。以 \mathbf{F} 表示此常力,作用的时间为 t ,则此力的冲量为
冲量是矢量,它的方向与常力的方向一致。
如果作用力 \mathbf{F} 是变量,在微小时间间隔 \mathrm{d}t 内,力 \mathbf{F} 的冲量称为元冲量,即
而力 \mathbf{F} 在作用时间 {t}_{1} \sim {t}_{2} 内的冲量是矢量积分
在国际单位制中,冲量的单位是 \mathrm{N} \cdot \mathrm{s} 。
2 动量定理
2.1 质点的动量定理
由前面的公式有
式(6)是质点动量定理的微分形式,即质点动量的增量等于作用于质点上的力的元冲量。
对式 (6) 积分,如时间由 {t}_{1} 到 {t}_{2} ,速度由 {v}_{1} 变为 {v}_{2} ,得
式 (7) 是质点动量定理的积分形式,即在某一时间间隔内,质点动量的变化量等于作用于质点的力在此段时间内的冲量。
2.2 质点系的动量定理
设质点系有 n 个质点,第 i 个质点的质量为 {m}_{i} ,速度为 {v}_{i} ;外界物体对该质点作用的力为 {\mathbf{F}}_{i}^{\left( \mathrm{e}\right) } ,称为外力,质点系内其他质点对该质点作用的力为 {\mathbf{F}}_{i}^{\left( \mathrm{i}\right) } ,称为内力。 根据质点的动量定理有
这样的方程共有 n 个,将这 n 个方程两端分别相加,得
因为质点系内质点相互作用的内力总是大小相等、方向相反地成对出现,所以内力冲量的矢量和等于零,即
又因 \sum \mathrm{d}\left( {{m}_{i}{v}_{i}}\right) = \mathrm{d}\sum \left( {{m}_{i}{v}_{i}}\right) = \mathrm{d}p ,是质点系动量的增量,于是得质点系动量定理的微分形式为
即质点系动量的增量等于作用于质点系的外力元冲量的矢量和。
式(8)也可写成
即质点系的动量对时间的导数等于作用于质点系的外力的矢量和(外力的主矢)。
设 t = {t}_{1} 时,质点系的动量为 {p}_{1},t = {t}_{2} 时,动量为 {p}_{2} ,将式 (8) 积分,得
或
式 (10) 为质点系动量定理的积分形式,即在某一时间间隔内,质点系动量的改变量等于在这段时间内作用于质点系外力冲量的矢量和。
由质点系的动量定理可知,质点系的内力不能改变质点系的动量。
动量定理是矢量式,在应用时常取投影形式,如式 (9) 和式 (10) 在直角坐标系的投影式为
和
例 1 电机的外壳固定在水平基础上,定子和机壳的总质量为 {m}_{1} ,转子质量为 {m}_{2} ,如图 2 所示。设定子的质心位于转轴的中心 {O}_{1} ,但由于制造误差,转子的质心 {O}_{2} 到 {O}_{1} 的距离为 e 。已知转子匀速转动,角速度为 \omega 。求基础的水平及铅垂约束力。
解: 取电机外壳与转子组成质点系,外力有重力 {m}_{1}\mathbf{g}\text{、}{m}_{2}\mathbf{g} ,基础的约束力 {\mathbf{F}}_{x}\text{、}{\mathbf{F}}_{y} 和约束力偶 {M}_{0} 。机壳不动,质点系的动量就是转子的动量,由式 (3),其大小为
p = {m}_{2}{\omega e}图 2
方向如图所示。设 t = 0 时,{O}_{1}{O}_{2} 铅垂,有 \varphi = {\omega t} 。由动量定理的投影式 (11),得
\frac{\mathrm{d}{p}_{x}}{\mathrm{\;d}t} = {F}_{x},\;\frac{\mathrm{d}{p}_{y}}{\mathrm{\;d}t} = {F}_{y} - {m}_{1}g - {m}_{2}g而
{p}_{x} = {m}_{2}{\omega e}\cos {\omega t},\;{p}_{y} = {m}_{2}{\omega e}\sin {\omega t}代入上式,解出基础约束力为
{F}_{x} = - {m}_{2}e{\omega }^{2}\sin {\omega t},\;{F}_{y} = \left( {{m}_{1} + {m}_{2}}\right) g + {m}_{2}e{\omega }^{2}\cos {\omega t}电机静止不转时,基础的约束力 \left( {{m}_{1} + {m}_{2}}\right) g 称为静约束力;电机转动时的基础约束力可称为动约束力。动约束力与静约束力的差值是由于系统运动而产生的,可称为附加动约束力。此例中,由于转子偏心而引起的在 x 轴方向附加动约束力 - {m}_{2}e{\omega }^{2}\sin {\omega t} 和 y 轴方向附加动约束力 {m}_{2}e{\omega }^{2}\cos {\omega t} 都是简谐力,将会引起电机和基础的振动。
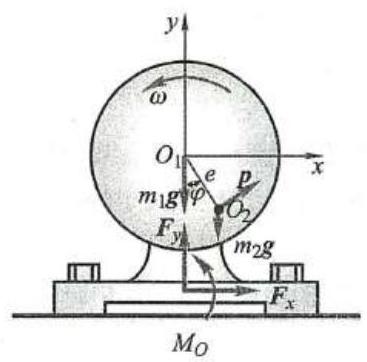
关于约束力偶 {M}_{0} ,可利用动量矩定理或达朗贝尔原理进行求解。
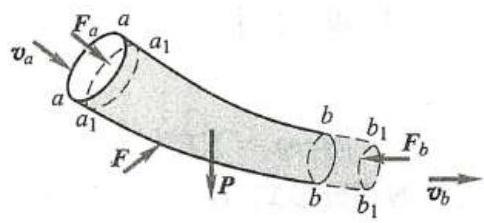
例 2 图3表示水流流经变截面弯管的示意图。设流体是不可压缩的,流动是稳定的。求管壁的附加动约束力。
解: 从管中取出所研究的两个截面 {aa} 与 {bb} 之间的流体作为质点系。经过时间 \mathrm{d}t ,这一部分流体流到两个截面 {a}_{1}{a}_{1} 与 {b}_{1}{b}_{1} 之间。令 {q}_{V} 为流体在单位时间内流过截面的体积流量,\rho 为密度,则质点系在时间 \mathrm{d}t 内流过截面的质量为
\mathrm{d}m = {q}_{v}\rho \mathrm{d}t图 3
在时间间隔 \mathrm{d}t 内质点系动量的变化为
\mathbf{p} - {\mathbf{p}}_{0} = {\mathbf{p}}_{a,b,} - {\mathbf{p}}_{ab} = \left( {{\mathbf{p}}_{b{b}_{1}} + {\mathbf{p}}_{a,b}}\right) - \left( {{\mathbf{p}}_{a,b}^{\prime } + {\mathbf{p}}_{a{a}_{1}}}\right)因为管内流动是稳定的,有 {\mathbf{p}}_{a,b} = {\mathbf{p}}_{a,b}^{\prime } ,于是,有
p - {p}_{0} = {p}_{b{b}_{1}} - {p}_{a{a}_{1}}\mathrm{d}t 为极小时间,可认为在截面 {aa} 与 {a}_{1}{a}_{1} 之间各质点的速度相同,设为 {v}_{a} ,截面 {b}_{1}{b}_{1} 与 {bb} 之间各质点的速度相同,设为 {\mathbf{v}}_{b} ,于是得
p - {p}_{0} = {q}_{V}\rho \mathrm{d}t\left( {{v}_{b} - {v}_{a}}\right)作用于质点系上的外力包括:均匀分布于体积 {aabb} 内的重力 \mathbf{P} ,管壁对于此质点系的作用力 \mathbf{F} ,以及两截面 {aa} 和 {bb} 上受到的相邻流体的压力 {\mathbf{F}}_{a} 和 {\mathbf{F}}_{b} 。
将动量定理应用于所研究的质点系,则有
{q}_{v}\rho \mathrm{d}t\left( {{v}_{b} - {v}_{a}}\right) = \left( {P + {F}_{a} + {F}_{b} + F}\right) \mathrm{d}t消去时间 \mathrm{d}t ,得
{q}_{V}\rho \left( {{v}_{b} - {v}_{a}}\right) = \mathbf{P} + {\mathbf{F}}_{a} + {\mathbf{F}}_{b} + \mathbf{F}若将管壁对于质点系的作用力 \mathbf{F} 分为 {\mathbf{F}}^{\prime } 和 {\mathbf{F}}^{\prime \prime } 两部分: {\mathbf{F}}^{\prime } 为与外力 \mathbf{P}\text{、}{\mathbf{F}}_{a} 和 {\mathbf{F}}_{b} 相平衡的管壁静约束力,{F}^{\prime \prime } 为由于流体的动量发生变化而产生的附加动约束力。则 {F}^{\prime } 满足平衡方程
P + {F}_{a} + {F}_{b} + {F}^{\prime } = 0而附加动约束力由下式确定:
{F}^{\prime \prime } = {q}_{v}\rho \left( {{v}_{b} - {v}_{a}}\right)设截面 {aa} 和 {bb} 的面积分别为 {A}_{a} 和 {A}_{b} ,由不可压缩流体的连续性定律知
{q}_{V} = {A}_{a}{v}_{a} = {A}_{b}{v}_{b}图 4
因此,只要知道流速和弯管的尺寸,即可求得附加动约束力。流体对管壁的附加动约束力大小等于此附加动约束力,但方向相反。
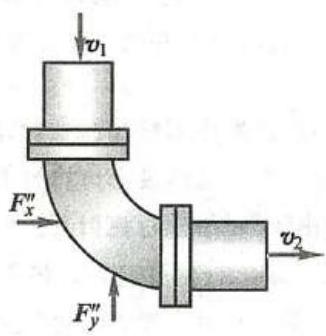
图 4 为一水平等截面直角弯管。当流体被迫改变流动方向时,对管壁施加有附加的作用力,它的大小等于管壁对流体作用的附加动约束力,即
{F}_{x}^{\prime \prime } = {q}_{v}\rho \left( {{v}_{2} - 0}\right) = \rho {A}_{2}{v}_{2}^{2},\;{F}_{y}^{\prime \prime } = {q}_{v}\rho \left( {0 + {v}_{1}}\right) = \rho {A}_{1}{v}_{1}^{2}由此可见,当流速很高或管子截面面积很大时,附加动约束力很大,在管子的弯头处应该安装支座。
2.3 质点系动量守恒定律
如果作用于质点系的外力的主矢恒等于零,根据式 (9) 或式 (10),质点系的动量保持不变,为常矢量,即
如果作用于质点系的外力主矢在某一坐标轴上的投影恒等于零,则根据式 (11) 或式 (12) ,质点系的动量在该坐标轴上的投影保持不变,为常量。例如 \sum {F}_{x}^{\left( \mathrm{e}\right) } = 0 ,则
以上结论称为质点系动量守恒定律。
应注意,内力虽不能改变质点系的动量,但是可改变质点系中各质点的动量。 例如,水平运动的火箭壳体与燃料组成质点系,虽然燃料燃烧产生的气体压力是内力,不能改变整体的动量,但是当气体向后喷出获得动量时,气体压力使火箭获得向前的动量,使火箭以不断增加的速度前进,而质点系整体的动量是守恒的。
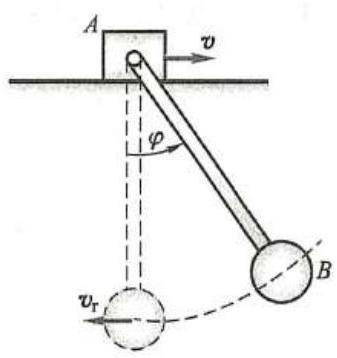
例 3 物块 A 可沿光滑水平面自由滑动,其质量为 {m}_{A} ;小球 B 的质量为 {m}_{B} ,以细杆与物块铰接,如图 5 所示。设细杆长为 l ,质量不计,初始时系统静止,并有初始摆角 {\varphi }_{0} ,释放后,细杆近似以 \varphi = {\varphi }_{0}\cos {\omega t} 规律摆动 ( \omega 为已知常数),求物块 A 的最大速度。
图 5
解: 取物块和小球为研究对象,此系统水平方向不受外力作用,则沿水平方向动量守恒。
细杆角速度为 \dot{\varphi } = - \omega {\varphi }_{0}\sin {\omega t} ,当 \sin {\omega t} = 1 时,其绝对值最大,此时应有 \cos {\omega t} = 0 ,即 \varphi = 0 。由此,当细杆铅垂时小球相对于物块有最大的水平速度,其值为
{v}_{\mathrm{r}} = l{\dot{\varphi }}_{\max } = {l\omega }{\varphi }_{0}当此速度 {v}_{\mathrm{r}} 向左时,物块应有向右的绝对速度,设为 v ,而小球向左的绝对速度大小为 {v}_{\mathrm{a}} = {v}_{\mathrm{r}} - {v}_{\mathrm{o}} 根据质点系动量守恒定律,有
{m}_{A}v - {m}_{B}\left( {{v}_{\mathrm{r}} - v}\right) = 0解出物块的最大速度为
v = \frac{{m}_{B}{v}_{\mathrm{r}}}{{m}_{A} + {m}_{B}} = \frac{{m}_{B}{l\omega }{\varphi }_{0}}{{m}_{A} + {m}_{B}}当 \sin {\omega t} = - 1 时,也有 \varphi = 0 。此时物块有向左的最大速度 \frac{{m}_{B}{l\omega }{\varphi }_{0}}{{m}_{A} + {m}_{B}} 。
3 质心运动定理
3.1 质量中心
质点系在力的作用下,其运动状态与各质点的质量及其相互的位置都有关系,即与质点系的质量分布状况有关。由式 (2),即
该式所定义的质心位置反映出质点系质量分布的一种特征。质心的概念及质心运动在质点系 (特别是刚体) 动力学中具有重要地位。计算质心位置时,常用上式在直角坐标系的投影形式,即
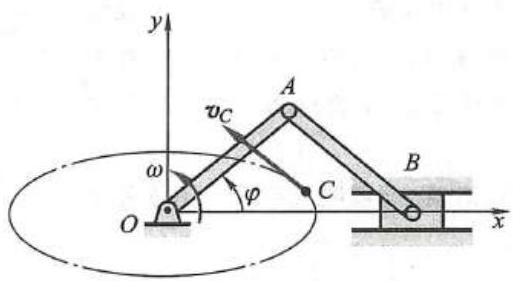
例 4 图6所示的曲柄滑块机构中,设曲柄 {OA} 受力偶作用以匀角速度 \omega 转动,滑块 B 沿 x 轴滑动。若 {OA} = {AB} = l ,杆 {OA} 及杆 {AB} 皆为均质杆,质量皆为 {m}_{1} ,滑块 B 的质量为 {m}_{2} 。求此系统的质心运动方程、运动轨迹及此系统的动量。
图 6
解: 建立如图所示直角坐标系 {Oxy} ,设 t = 0 时,杆 {OA} 水平,则有 \varphi = {\omega t} 。由式 (13) 得质心 C 的坐标为
\left. \begin{array}{l} {x}_{c} = \frac{{m}_{1}\frac{l}{2} + {m}_{1}\frac{3l}{2} + 2{m}_{2}l}{2{m}_{1} + {m}_{2}}\cos {\omega t} = \frac{2\left( {{m}_{1} + {m}_{2}}\right) }{2{m}_{1} + {m}_{2}}l\cos {\omega t} \\ {y}_{c} = \frac{2{m}_{1}\frac{l}{2}}{2{m}_{1} + {m}_{2}}\sin {\omega t} = \frac{{m}_{1}}{2{m}_{1} + {m}_{2}}l\sin {\omega t} \end{array}\right\} \tag{a}式 (a) 为此系统质心 C 的运动方程,消去时间 t ,得
{\left\lbrack \frac{\frac{{x}_{c}}{2\left( {{m}_{1} + {m}_{2}}\right) l}}{2{m}_{1} + {m}_{2}}\right\rbrack }^{2} + {\left( \frac{{y}_{c}}{\frac{{m}_{1}l}{2{m}_{1} + {m}_{2}}}\right) }^{2} = 1 \tag{b}即质心 C 的运动轨迹为一椭圆,如图中点画线所示。应该指出,系统的质心一般不在其中某一物体上,而是空间的某一特定点。
为求系统的动量,可将式(3)沿 x 、 y 轴投影,即
{p}_{x} = m{v}_{Cx},\;{p}_{y} = m{v}_{Cy}此例中 m = \sum {m}_{i} = 2{m}_{1} + {m}_{2} 。由式 (a) 得
{v}_{{C}_{x}} = {\dot{x}}_{C} = \frac{-2\left( {{m}_{1} + {m}_{2}}\right) }{2{m}_{1} + {m}_{2}}{l\omega }\sin {\omega t},\;{v}_{{C}_{y}} = {\dot{y}}_{C} = \frac{{m}_{1}}{2{m}_{1} + {m}_{2}}{l\omega }\cos {\omega t}则得系统动量沿 x 、 y 轴的投影为
{p}_{x} = - 2\left( {{m}_{1} + {m}_{2}}\right) {l\omega }\sin {\omega t},\;{p}_{y} = {m}_{1}{l\omega }\cos {\omega t}系统动量的大小为
p = \sqrt{{p}_{x}^{2} + {p}_{y}^{2}} = {l\omega }\sqrt{4{\left( {m}_{1} + {m}_{2}\right) }^{2}{\sin }^{2}{\omega t} + {m}_{1}^{2}{\cos }^{2}{\omega t}}系统动量的方向沿质心运动轨迹的切线方向,可用其方向余弦表示。
3.2 质心运动定理
由于质点系的动量等于质点系的质量与质心速度的乘积,因此动量定理的微分形式可写成
对于质量不变的质点系,上式可改写为
或
式中 {\mathbf{a}}_{c} 为质心的加速度。式(14)表明,质点系的质量与质心加速度的乘积等于作用于质点系外力的矢量和 (即等于外力的主矢)。这种规律称为质心运动定理。
式 (14) 与质点动力学的基本方程 {ma} = \mathbf{F} 相似,因此质心运动定理也可叙述如下: 质点系质心的运动,可以看成为一个质点的运动,设想此质点集中了整个质点系的质量及其所受的外力。
例如在爆破山石时,土石碎块向各处飞落,如图 7 所示。在尚无碎石落地前,全部土石碎块的质心运动与一个抛射质点的运动一样,设想这个质点的质量等于质点系的全部质量,作用在这个质点上的力是质点系中各质点重力的总和。根据质心的运动轨迹,可以在定向爆破时,预先估计大部分土石块堆落的地方。
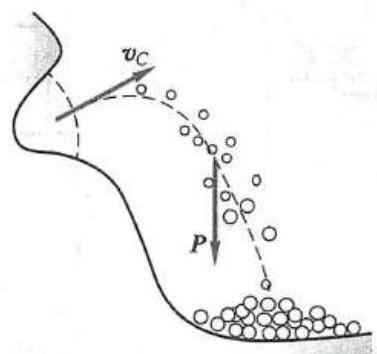
图 7
但质心运动定理与质点动力学的基本方程又是不同的。 {ma} = \mathbf{F} 是公理,它描述质点运动状态变化的规律。 m{a}_{c} = \sum {F}_{i}^{\left( e\right) } 是导出的定理,它描述质点系质心运动状态变化的规律。
例如,在图 8 中,均质杆 {AB} 仅在 A 端受力 \mathbf{F} 作用,但 {\mathbf{a}}_{A} \neq \mathbf{F}/m ,这是由于杆 {AB} 不是质量集中于点 A 的质点,因此不能应用质点动力学的基本方程。由质心运动定理可以确定杆 {AB} 的质心点 C 的加速度 {a}_{c} = F/m 。尽管力 F 作用于点 A ,但可直接得到点 C 的加速度。
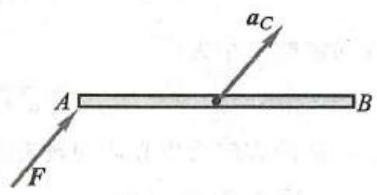
图 8
由质心运动定理可知,质点系的内力不影响质心的运动状态,只有外力才能改变质心的运动状态。例如,在汽车的发动机中,气体的压力是内力,虽然这个力是汽车行驶的原动力,但是它不能使汽车的质心运动。这种气体压力推动气缸内的活塞,经过一套机构转动车轮,靠车轮与地面的摩擦力推动汽车前进。
质心运动定理是矢量式,应用时常取投影形式。
直角坐标轴上的投影式为
自然轴上的投影式为
下面举例说明质心运动定理的应用。
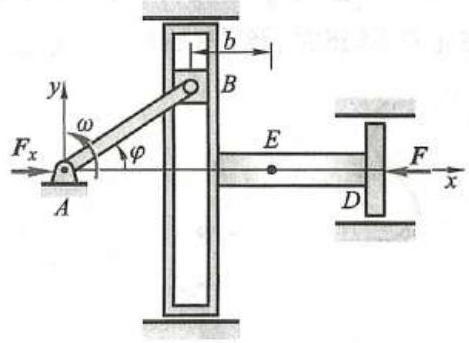
例 5 均质曲柄 {AB} 长为 r ,质量为 {m}_{1} ,初始位于水平位置,假设受力偶作用以不变的角速度 \omega 转动,并带动滑槽、连杆及与连杆固连的活塞 D ,如图 9 所示。滑槽、连杆、活塞总质量为 {m}_{2} ,质心在点 E 。在活塞上作用一恒力 F 。不计摩擦及滑块 B 的质量,求作用在曲柄 {AB} 轴 A 处的最大水平约束力 {\mathbf{F}}_{x} 。
图 9
解: 选取整个机构为研究的质点系。作用在水平方向的外力有 \mathbf{F} 和 {\mathbf{F}}_{x} ,且力偶不影响质心运动。
列出质心运动定理在 x 轴上的投影式:
\left( {{m}_{1} + {m}_{2}}\right) {a}_{Cx} = {F}_{x} - F为求质心的加速度在 x 轴上的投影,先计算质心的坐标,然后把它对时间取二阶导数,即
{x}_{c} = \left\lbrack {{m}_{1}\frac{r}{2}\cos \varphi + {m}_{2}\left( {r\cos \varphi + b}\right) }\right\rbrack \cdot \frac{1}{{m}_{1} + {m}_{2}}其中 \varphi = {\omega t} ,则
{a}_{Cx} = \frac{{\mathrm{d}}^{2}{x}_{C}}{\mathrm{\;d}{t}^{2}} = \frac{-r{\omega }^{2}}{{m}_{1} + {m}_{2}}\left( {\frac{{m}_{1}}{2} + {m}_{2}}\right) \cos {\omega t}应用质心运动定理,解得
{F}_{x} = F - r{\omega }^{2}\left( {\frac{{m}_{1}}{2} + {m}_{2}}\right) \cos {\omega t}显然,最大水平约束力为
{F}_{x\max } = F + r{\omega }^{2}{\left( \frac{{m}_{1}}{2} + {m}_{2}\right) }_{.}
3.3 质心运动守恒定律
由质心运动定理知:如果作用于质点系的外力主矢恒等于零,则质心做匀速直线运动;若初始静止,则质心位置始终保持不变。如果作用于质点系的所有外力在某轴上投影的代数和恒等于零,则质心速度在该轴上的投影保持不变;若初始时速度投影等于零,则质心沿该轴的坐标保持不变。
以上结论,称为质心运动守恒定律。
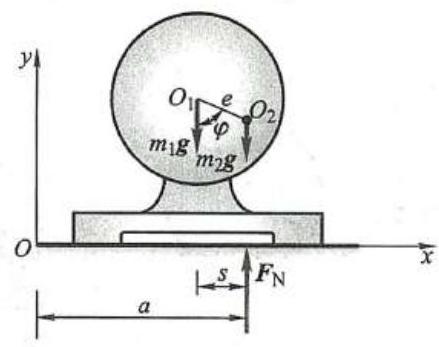
例 6 如图10所示,设例 1 中的电机没用螺栓固定,各处摩擦不计,初始时电机静止,求转子以匀角速度 \omega 转动时电机外壳的运动规律。
图 10
解: 电机在水平方向没有受到外力作用,且初始为静止,因此系统质心的坐标 {x}_{c} 保持不变。
取坐标系如图所示。转子在静止时其质心 {O}_{2} 在最低点,设 {x}_{C1} = a 。当转子转过角度 \varphi 时,定子应向左移动,设移动距离为 s ,则质心坐标为
{x}_{C2} = \frac{{m}_{1}\left( {a - s}\right) + {m}_{2}\left( {a + e\sin \varphi - s}\right) }{{m}_{1} + {m}_{2}}在水平方向运用质心运动守恒定律,有 {x}_{C1} = {x}_{C2} ,解得
s = \frac{{m}_{2}}{{m}_{1} + {m}_{2}}e\sin \varphi电机在水平面上往复运动。
顺便指出,支承面的法向约束力的最小值可由例 1 的结果求得为
{F}_{\text{ymin }} = \left( {{m}_{1} + {m}_{2}}\right) g - {m}_{2}e{\omega }^{2}当 \omega > \sqrt{\frac{{m}_{1} + {m}_{2}}{{m}_{2}e}g} 时,有 {F}_{y\min } < 0 ,如果电机未用螺栓固定,将会跳起来。