刚体的平面运动是工程机械中较为常见的一种刚体运动,它可以看作为平移与转动的合成,也可以看作为绕不断运动的轴的转动。
1 刚体平面运动的概述和运动分解
工程中有很多零件的运动,例如,行星齿轮机构中动齿轮 A 的运动 (图1)、 曲柄连杆机构中连杆 {AB} 的运动 (图2),以及沿直线轨道滚动的轮子的运动等,这些刚体的运动既不是平移,又不是绕定轴的转动,但它们有一个共同的特点,即在运动中,刚体上的任意一点与某一固定平面始终保持相等的距离,这种运动称为平面运动。平面运动刚体上的各点都在平行于某一固定平面的平面内运动。
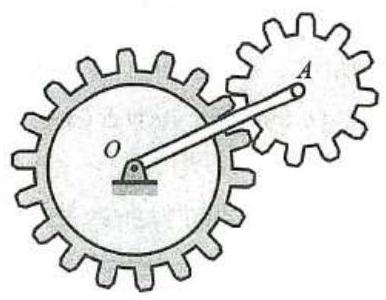
图1
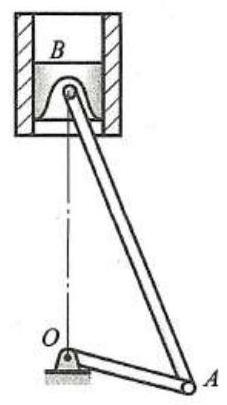
图2
图3a 所示为一连杆的简图,用一个平行于固定平面的平面截割连杆,得截面 S ,它是一个平面图形 (图3b)。当连杆运动时,图形内任意一点始终在自身平面内运动。若通过图形上任一点做垂直于图形的直线,则当刚体做平面运动时,该直线做平移,因此,平面图形上的这一点与直线上各点的运动完全相同。由此可知,平面图形上各点的运动可以代表刚体内所有点的运动。因此,刚体的平面运动可简化为平面图形在它自身平面内的运动。
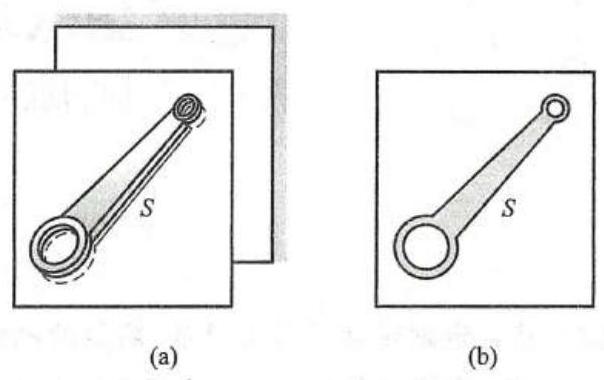
图3
平面图形在其平面上的位置完全可由图形内任意线段 {O}^{\prime }M 的位置来确定 (图4),而要确定此线段在平面内的位置,只要确定线段上任一点 {O}^{\prime } 的位置和线段 {O}^{\prime }M 与定坐标轴 x 轴间的夹角 \varphi 即可。给定了点 {O}^{\prime } 的坐标及夹角 \varphi 随时间的变化规律,也就给定了平面图形的运动,而这些参数随时间变化的关系式为
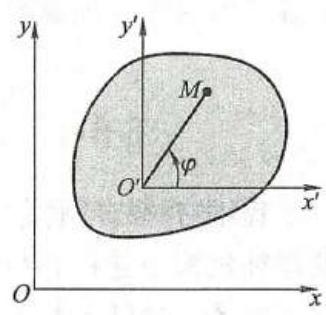
图4
式 (1) 称为平面图形的运动方程。上述描述平面图形运动的方法称为基点法,其中点 {O}^{\prime } 称为基点,夹角 \varphi 称为平面图形的转角。
运动方程式 (1) 的含义也可以用合成运动的观点加以解释。假想在点 {O}^{\prime } 安上一个平移参考系 {O}^{\prime }{x}^{\prime }{y}^{\prime } ,当平面图形运动时,动坐标轴方向保持不变,始终平行于定坐标轴 x 轴和 y 轴,如图4 所示。于是平面图形的运动可看成为随点 {O}^{\prime } 的平移 \left\lbrack {{x}_{{O}^{\prime }} = {f}_{1}\left( t\right) ,{y}_{{O}^{\prime }} = {f}_{2}\left( t\right) }\right\rbrack 和绕点 {O}^{\prime } 的转动 \left\lbrack {\varphi = {f}_{3}\left( t\right) }\right\rbrack 这两部分运动的合成。
以沿直线轨道滚动的车轮为例 (图5a),取车厢为动参考体,以轮心点 {O}^{\prime } 为原点取动参考系 {O}^{\prime }{x}^{\prime }{y}^{\prime } ,则车厢的平移是牵连运动,车轮绕平移参考系原点 {O}^{\prime } 的转动是相对运动,二者的合成就是车轮的平面运动 (绝对运动)。轮子单独做平面运动时,可以轮心 {O}^{\prime } 为原点,建立一个平移参考系 {O}^{\prime }{x}^{\prime }{y}^{\prime } (图5b),同样可把轮子这种较为复杂的平面运动分解为平移和转动两种简单的运动。
图6 所示的曲柄连杆机构中,曲柄 {OA} 为定轴转动,滑块 B 为直线平移,而连杆 {AB} 则做平面运动。如以点 B 为基点,即在滑块 B 上建立一个平移参考系,以 B{x}^{\prime }{y}^{\prime } 表示,则杆 {AB} 的平面运动可分解为随同基点 B 的直线平移和在动参考系 B{x}^{\prime }{y}^{\prime } 内绕基点 B 的转动。同样,还可以点 A 为基点,在点 A 安上一个平移参考系 A{x}^{\prime \prime }{y}^{\prime \prime } ,杆 {AB} 的平面运动又可分解为随同基点 A 的平移和绕基点 A 的转动。
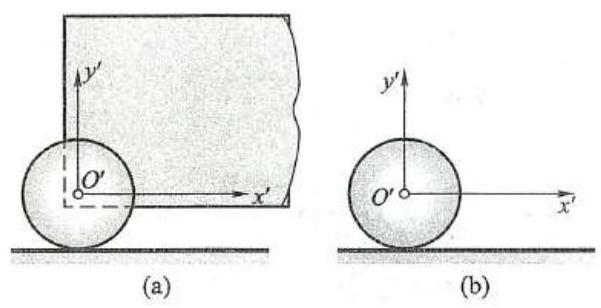
图5
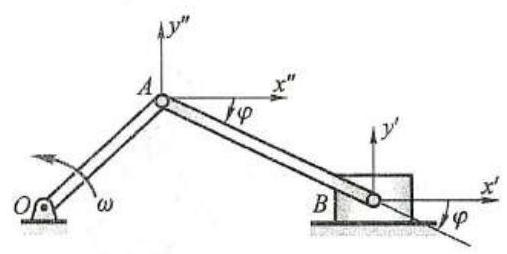
图6
必须指出,上述分解中,总是以选定的基点为原点,建立一个平移参考系 (实际机构中可以不存在这个平移物体),所谓绕基点的转动,是指相对于这个平移参考系的转动。
研究平面运动时,可以选择不同的点作为基点。一般平面图形上各点的运动情况是不相同的,例如,图6 所示连杆 {AB} 上的点 B 做直线运动,点 A 做圆周运动。因此,在平面图形上选取不同的基点,其动参考系的平移是不一样的,其速度和加速度是不相同的。由图6 还可以看出: 如果运动起始时杆 {OA} 和杆 {AB} 都位于水平位置,运动中的任一时刻,{AB} 连线绕点 A 或绕点 B 的转角,相对于各自的平移参考系 A{x}^{\prime \prime }{y}^{\prime \prime } 或 B{x}^{\prime }{y}^{\prime } ,都是一样的,都等于相对于定参考系的转角 \varphi 。由于任一时刻的转角相同,其角速度、角加速度也必然相同。于是可得结论:平面运动可取任意基点而分解为平移和转动,其中平移的速度和加速度与基点的选择有关,而平面图形绕基点转动的角速度和角加速度与基点的选择无关。这里所谓的角速度和角加速度是相对于各基点处的平移参考系而言的。平面图形相对于各平移参考系 (包括定参考系),其转动运动都是一样的,角速度、角加速度都是共同的,无须标明绕哪一点转动或选哪一点为基点。
2 求平面图形内各点速度的基点法
给定了平面图形的运动方程,就可以进一步确定图形内各点的速度分布。设点 M 是平面图形上任意一点,取点 M 为动点,动参考系为在点 {O}^{\prime } 安装的平移参考系 {O}^{\prime }{x}^{\prime }{y}^{\prime } 。因为牵连运动为平移,所以点 M 的牵连速度等于基点的速度,{v}_{\mathrm{e}} = {v}_{{O}^{\prime }} ,而点 M 的相对运动是绕基点的圆周运动,相对速度等于平面图形绕基点转动时点 M 的速度,以 {v}_{M{O}^{\prime }} 表示,它垂直于 {O}^{\prime }M 并指向图形转动的方向,大小为
式中,\omega 为平面图形角速度的绝对值 (以下同)。由点的速度合成公式,有
上式是平面图形内任意点 M 的速度分解式 (图7)。根据此式,可做出平面图形
内直线 {O}^{\prime }M 上各点速度的分布图,如图8 所示。

图7
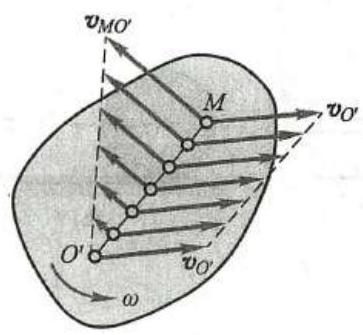
图8
于是得结论:平面图形内任一点的速度等于基点的速度与该点随图形绕基点转动速度的矢量和。
根据这个结论,平面图形内任意两点 A 和 B 的速度 {v}_{A} 和 {v}_{B} 必存在一定的关系。如果选取点 A 为基点,以 {v}_{BA} 表示点 B 相对点 A 的相对速度,根据上述结论,得
式中,相对速度 {v}_{BA} 的大小为
它的方向垂直于 {AB} ,且朝向图形转动的一方。
在解题时常会用到式( 3)。在这里 {\mathbf{v}}_{A}\text{、}{\mathbf{v}}_{B} 和 {\mathbf{v}}_{BA} 均有大小和方向两个要素,共计 6 个要素,要使问题可解,一般应有 4 个要素是已知的。在平面图形的运动中,点的相对速度 {v}_{BA} 的方向总是已知的,它垂直于线段 {AB} 。于是,只需知道任何其他 3 个要素,便可作出速度平行四边形。
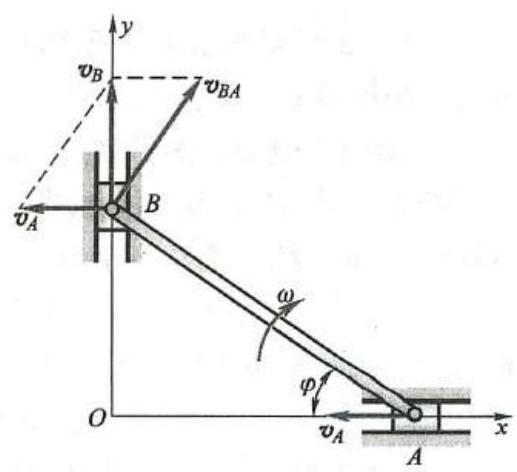
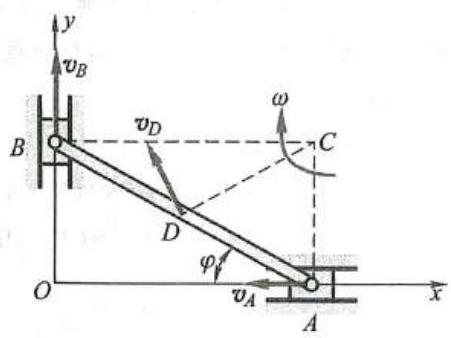
例1 椭圆规尺的 A 端以速度 {v}_{A} 沿 x 轴的负向运动,如图9 所示,{AB} = l 。求 B 端的速度及尺 {AB} 的角速度。
解: 尺 {AB} 做平面运动,因而可用公式
{\mathbf{v}}_{B} = {\mathbf{v}}_{A} + {\mathbf{v}}_{BA}在本题中 {v}_{A} 的大小和方向,以及 {v}_{B} 的方向都是已知的 (因 B 端在 y 轴上做直线运动)。共计有三个要素是已知的,再加上 {\mathbf{v}}_{BA} 的方向垂直于 {AB} 这一要素,可以做出速度平行四边形如图9 所示。 做图时,应注意使 {v}_{B} 位于平行四边形的对角线上。
图9
由图中的几何关系可得
{v}_{B} = {v}_{A}\cot \varphi此外,有
{v}_{BA} = \frac{{v}_{A}}{\sin \varphi }但另一方面,{v}_{BA} = {AB} \cdot \omega ,此处 \omega 是尺 {AB} 的角速度,由此得
\omega = \frac{{v}_{BA}}{AB} = \frac{{v}_{BA}}{l} = \frac{{v}_{A}}{l\sin \varphi }
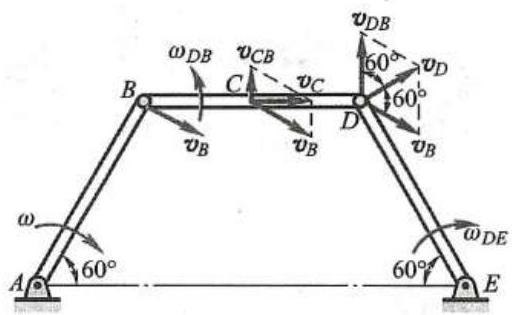
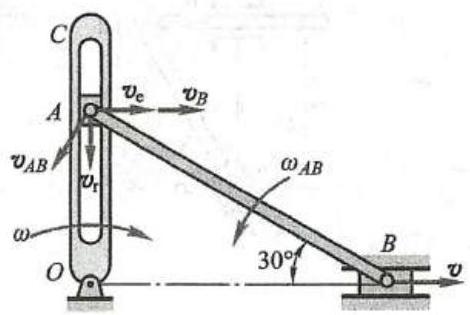
例2 图10 所示平面机构中,{AB} = {BD} = {DE} = l = {300}\mathrm{\;{mm}} 。在图示位置时,{BD}//{AE} ,杆 {AB} 的角速度为 \omega = 5\mathrm{{rad}}/\mathrm{s} 。求此瞬时杆 {DE} 的角速度和杆 {BD} 中点 C 的速度。
图10
解: 杆 {DE} 绕点 E 转动,为求其角速度可先求点 D 的速度。杆 {BD} 做平面运动,而点 B 也是转动刚体杆 {AB} 上一点,其速度为
{v}_{B} = {\omega l} = {300}\mathrm{\;{mm}} \times 5\mathrm{{rad}}/\mathrm{s} = {1.5}\mathrm{\;m}/\mathrm{s}方向如图所示。
对平面运动的杆 {BD} ,可以点 B 为基点,按式 (3) 得
{\mathbf{v}}_{D} = {\mathbf{v}}_{B} + {\mathbf{v}}_{DB}其中,{v}_{B} 大小和方向均为已知,相对速度 {v}_{DB} 的方向与杆 {BD} 垂直,点 D 的速度 {v}_{D} 与杆 {DE} 垂直。 由于上式中四个要素是已知的,可以做出其速度平行四边形如图所示,其中 {\mathbf{v}}_{D} 位于平行四边形的对角线。由此瞬时的几何关系,得知
{v}_{D} = {v}_{DB} = {v}_{B} = {1.5}\mathrm{\;m}/\mathrm{s}于是解出此瞬时杆 {DE} 的角速度为
{\omega }_{DE} = \frac{{v}_{D}}{l} = \frac{{1.5}\mathrm{\;m}/\mathrm{s}}{{0.3}\mathrm{\;m}} = 5\mathrm{{rad}}/\mathrm{s}方向如图所示。
{v}_{DB} 为点 D 相对点 B 的速度,应有
{v}_{DB} = {\omega }_{BD} \cdot {BD}由此可得此瞬时杆 {BD} 的角速度为
{\omega }_{BD} = \frac{{v}_{DB}}{l} = \frac{{1.5}\mathrm{\;m}/\mathrm{s}}{{0.3}\mathrm{\;m}} = 5\mathrm{{rad}}/\mathrm{s}方向如图所示。在求得杆 {BD} 角速度的基础上,可以点 B 或点 D 为基点,求出杆 {BD} 上任一点的速度。如仍以点 B 为基点,杆 {BD} 中点 C 的速度为
{\mathbf{v}}_{C} = {\mathbf{v}}_{B} + {\mathbf{v}}_{CB}其中,{v}_{B} 的大小和方向均为已知,{v}_{CB} 方向与杆 {BD} 垂直,大小为 {v}_{CB} = {\omega }_{BD} \cdot \frac{l}{2} = {0.75}\mathrm{\;m}/\mathrm{s} 。已知四个要素,可做出上式的速度平行四边形如图所示。由此瞬时速度矢的几何关系,得出此时 {\mathbf{v}}_{c}
的方向恰好沿杆 {BD} ,大小为
{v}_{C} = \sqrt{{v}_{B}^{2} - {v}_{CB}^{2}} \approx {1.299}\mathrm{\;m}/\mathrm{s}
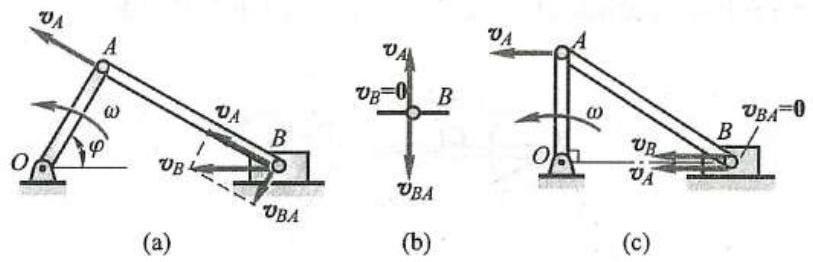
例3 曲柄连杆机构如图11a 所示,{OA} = r,{AB} = \sqrt{3}r 。如曲柄 {OA} 以匀角速度 \omega 转动,求当 \varphi = {60}^{ \circ }\text{、}{0}^{ \circ } 和 {90}^{ \circ } 时点 B 的速度。
图11
解: 连杆 {AB} 做平面运动,以点 A 为基点,点 B 的速度为
{\mathbf{v}}_{B} = {\mathbf{v}}_{A} + {\mathbf{v}}_{BA}其中,{v}_{A} = {\omega r} ,方向与杆 {OA} 垂直,{v}_{B} 沿 {OB} 方向,{v}_{BA} 与杆 {AB} 垂直。上式中四个要素是已知的,可以做出其速度平行四边形。
当 \varphi = {60}^{ \circ } 时,由于 {AB} = \sqrt{3}{OA} ,杆 {OA} 恰与杆 {AB} 垂直,其速度平行四边形如图11a 所示,解出
{v}_{B} = \frac{{v}_{A}}{\cos {30}^{ \circ }} = \frac{2\sqrt{3}}{3}{\omega r}当 \varphi = {0}^{ \circ } 时,{v}_{A} 与 {v}_{BA} 均垂直于杆 {OB} ,也垂直于 {v}_{B} ,按速度平行四边形合成法则,应有 {v}_{B} = 0 (图11b)。
当 \varphi = {90}^{ \circ } 时,{v}_{A} 与 {v}_{B} 方向一致,而 {v}_{BA} 又垂直于杆 {AB} ,其速度平行四边形应为一直线段,如图11c 所示,显然有
{v}_{B} = {v}_{A} = {\omega r}而 {v}_{BA} = 0 。此时杆 {AB} 的角速度为零,A\text{、}B 两点的速度大小与方向都相同,杆 {AB} 具有平移刚体的特征。但杆 {AB} 只在此瞬时有 {v}_{B} = {v}_{A} ,其他时刻则不然,因而称此时的杆 {AB} 做瞬时平移。
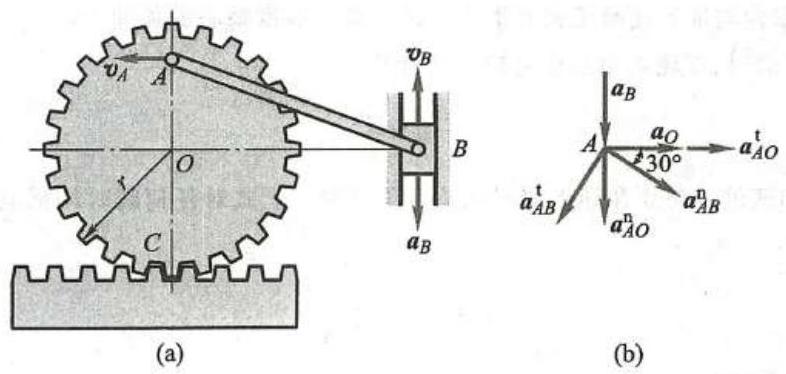
例4 图12 所示的行星轮系中,大齿轮 I 固定,半径为 {r}_{1} ;行星齿轮 II 沿齿轮 I 只滚动而不滑动,半径为 {r}_{2} 。系杆 {OA} 角速度为 {\omega }_{0} 。求齿轮 \mathrm{{II}} 的角速度 {\omega }_{\mathrm{{II}}} 及其上 B\text{、}C 两点的速度。
图12
解: 行星齿轮 II 做平面运动,其上点 A 的速度可由系杆 {OA} 的转动求得,即
{v}_{A} = {\omega }_{O} \cdot {OA} = {\omega }_{O}\left( {{r}_{1} + {r}_{2}}\right)方向如图所示。
以点 A 为基点,齿轮 \mathrm{{II}} 上与齿轮 \mathrm{I} 接触的点 D 的速度应为
{\mathbf{v}}_{D} = {\mathbf{v}}_{A} + {\mathbf{v}}_{DA}由于齿轮 \mathrm{I} 固定不动,接触点 D 不滑动,显然 {v}_{D} = 0 ,因而有 {v}_{DA} = {v}_{A} = {\omega }_{0}\left( {{r}_{1} + {r}_{2}}\right) ,方向与 {v}_{A} 相反,如图所示。 {v}_{DA} 为点 D 相对基点 A 的速度,应有 {v}_{DA} = {\omega }_{\text{II }} \cdot {DA} 。由此可得
{\omega }_{\mathrm{H}} = \frac{{v}_{DA}}{DA} = \frac{{\omega }_{O}\left( {{r}_{1} + {r}_{2}}\right) }{{r}_{2}}为逆时针转向,如图所示。
以点 A 为基点,点 B 的速度为
{\mathbf{v}}_{B} = {\mathbf{v}}_{A} + {\mathbf{v}}_{BA}而 {v}_{BA} = {\omega }_{\text{II }} \cdot {BA} = {\omega }_{0}\left( {{r}_{1} + {r}_{2}}\right) = {v}_{A} ,方向与 {v}_{A} 垂直,如图所示。因此,{v}_{B} 与 {v}_{A} 的夹角为 {45}^{ \circ } ,指向如图所示,大小为
{v}_{B} = \sqrt{2}{v}_{A} = \sqrt{2}{\omega }_{0}\left( {{r}_{1} + {r}_{2}}\right)以点 A 为基点,点 C 的速度为
{\mathbf{v}}_{C} = {\mathbf{v}}_{A} + {\mathbf{v}}_{CA}而 {v}_{CA} = {\omega }_{\text{II }} \cdot {AC} = {\omega }_{O}\left( {{r}_{1} + {r}_{2}}\right) = {v}_{A} ,方向与 {v}_{A} 一致,由此可得
{v}_{C} = {v}_{A} + {v}_{CA} = 2{\omega }_{0}\left( {{r}_{1} + {r}_{2}}\right)

总结以上各例的解题步骤如下:
(1)分析题中各物体的运动,哪些物体做平移,哪些物体做转动,哪些物体做平面运动。
(2)研究做平面运动的物体上哪一点的速度大小和方向是已知的,哪一点的速度的某一要素 (一般是速度方向) 是已知的。
(3)选定基点 (设为点 A ),而另一点 (设为点 B ) 可应用公式 {\mathbf{v}}_{B} = {\mathbf{v}}_{A} + {\mathbf{v}}_{BA} ,做速度平行四边形。必须注意,做图时要使 {v}_{B} 成为平行四边形的对角线。
(4)利用几何关系,求解平行四边形中的未知量。
(5)如果需要再研究另一个做平面运动的物体,可按上述步骤继续进行。
根据式 (3) 容易导出速度投影定理:同一平面图形上任意两点的速度在这两点连线上的投影相等。
证明: 在图形上任取两点 A 和 B ,它们的速度分别为 {v}_{A} 和 {v}_{B} ,参考图7,则两点的速度必须符合如下关系:
将上式等号两端投影到直线 {AB} 上,并分别用 {\left( {v}_{B}\right) }_{AB},{\left( {v}_{A}\right) }_{AB},{\left( {v}_{BA}\right) }_{AB} 表示 {v}_{B} 、 {\mathbf{v}}_{A} 、 {\mathbf{v}}_{BA} 在线段 {AB} 上的投影,则
由于 {v}_{BA} 垂直于线段 {AB} ,因此 {\left( {v}_{BA}\right) }_{AB} = 0 。于是得到
这就证明了上述定理。
这个定理也可以由下面的理由来说明:因为点 A 和点 B 是刚体上的两点,它们之间的距离应保持不变,所以两点的速度在 {AB} 方向的分量必须相同。否则,线段 {AB} 不是伸长,便是缩短。因此,速度投影定理不仅适用于刚体做平面运动,也适合于刚体做其他任意的运动。
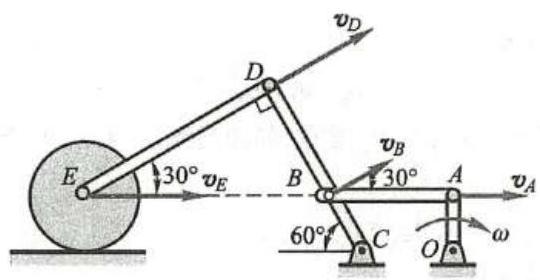
例5 图13 所示的平面机构中,曲柄 {OA} 长为 {100}\mathrm{\;{mm}} ,以角速度 \omega = 2\mathrm{{rad}}/\mathrm{s} 转动。连杆 {AB} 带动摇杆 {CD} ,并拖动轮 E 沿水平面滚动。已知 {CD} = {3CB} ,在图示位置时 A\text{、}B\text{、}E 三点恰在一水平线上,且 {CD} \bot {ED} 。求此瞬时点 E 的速度。
图13
解:
{v}_{A} = \omega \cdot {OA} = 2\mathrm{{rad}}/\mathrm{s} \times {100}\mathrm{\;{mm}} = {0.2}\mathrm{\;m}/\mathrm{s}由速度投影定理,杆 {AB} 上点 A 和点 B 的速度在 {AB} 线上投影相等,即
{v}_{B}\cos {30}^{ \circ } = {v}_{A}解出
{v}_{B} = {0.2309}\mathrm{\;m}/\mathrm{s}摇杆 {CD} 绕点 C 转动,有
{v}_{D} = \frac{{v}_{B}}{CB} \cdot {CD} = 3{v}_{B} = {0.6928}\mathrm{\;m}/\mathrm{s}轮 E 沿水平面滚动,轮心 E 的速度方向为水平,由速度投影定理,D 、 E 两点的速度关系为
{v}_{E}\cos {30}^{ \circ } = {v}_{D}解出
{v}_{E} = {0.8}\mathrm{\;m}/\mathrm{s}
3 求平面图形内各点速度的瞬心法
研究平面图形上各点的速度,还可以采用瞬心法。求解问题时,瞬心法形象性更好,有时更为方便。

图14
3.1 定理
一般情况,在每一瞬时,平面图形上都唯一地存在一个速度为零的点。
证明: 设有一个平面图形 S ,如图14 所示。取图形上的点 A 为基点,它的速度为 {v}_{A} ,图形的角速度的绝对值为 \omega ,转向如图所示。图形上任一点 M 的速度可按下式计算:
如果点 M 在 {v}_{A} 的垂线 {AN} 上 (由 {v}_{A} 到 {AN} 的转向与图形的转向一致),由图中看出,{\mathbf{v}}_{A} 和 {\mathbf{v}}_{MA} 在同一直线上,而方向相反,故 {\mathbf{v}}_{M} 的大小为
由上式可知,随着点 M 在垂线 {AN} 上的位置不同,{v}_{M} 的大小也不同,因此只要角速度 \omega 不等于零,总可以找到一点 C ,该点的瞬时速度等于零。如令
则
于是定理得到证明。在某一瞬时,平面图形内速度等于零的点称为瞬时速度中心,或称为速度瞬心。
3.2 平面图形内各点的速度及其分布
根据上述定理,每一瞬时在平面图形内都存在速度等于零的一点 C ,即 {v}_{c} = 0 。 选取点 C 作为基点,图15a 中 A\text{、}B\text{、}D 等各点的速度为
由此得结论:平面图形内任一点的速度等于该点随图形绕瞬时速度中心转动的速度。
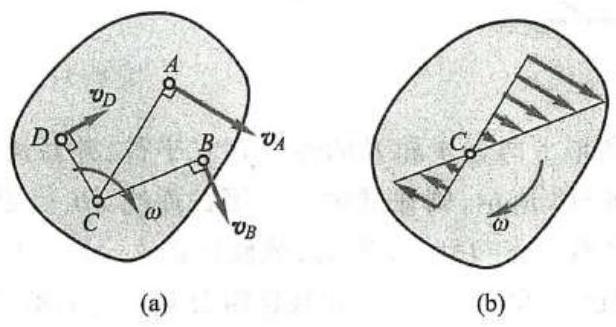
图15
由于平面图形绕任意点转动的角速度都相等 (参看 1 ),因此平面图形绕速度瞬心 C 转动的角速度等于图形绕任一基点转动的角速度,以 \omega 表示这个角速度,于是有
由此可见,平面图形内各点速度的大小与该点到速度瞬心的距离成正比。速度的方向垂直于该点到速度瞬心的连线,指向图形转动的一方,如图15a 所示。 这样求出的速度的分布情况,可使我们得到一个简单而清晰的概念。
平面图形上各点速度在某瞬时的分布情况,与图形绕定轴转动时各点速度的分布情况相类似 (图15b)。于是,平面图形的运动可看成围绕速度瞬心的瞬时转动。
应该强调指出,刚体做平面运动时,一般情况下在每一瞬时,图形内必有一点成为速度瞬心;但是,在不同的瞬时,速度瞬心在图形内的位置是不同的。
综上所述可知,**如果已知平面图形在某一瞬时的速度瞬心位置和角速度,则在该瞬时,图形内任一点的速度可以完全确定。**在解题时,根据机构的几何条件,确定速度瞬心位置的方法有下列几种:
(1)平面图形沿一固定表面做无滑动的滚动,如图16 所示。图形与固定面的接触点 C 就是图形的速度瞬心,因为在这一瞬时,点 C 相对于固定面的速度为零,所以它的绝对速度等于零。车轮滚动的过程中,轮缘上的各点相继与地面接触而成为车轮在不同时刻的速度瞬心。
(2)已知平面图形内任意两点 A 和 B 的速度的方向,如图17 所示,速度瞬心 C 的位置必在每一点速度的垂线上。因此在图17 中,通过点 A 做垂直于 {v}_{A} 方向的直线 {Aa} ;再通过点 B 做垂直于 {v}_{B} 方向的直线 {Bb} ,设两条直线交于点 C ,则点 C 就是平面图形的速度瞬心。
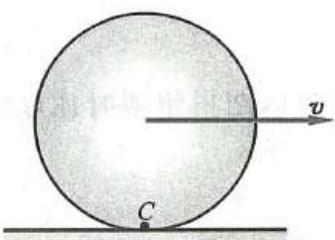
图16
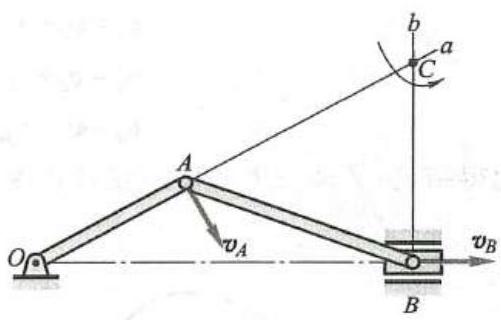
图17
(3)已知平面图形上两点 A 和 B 的速度相互平行,并且速度的方向垂直于两点的连线 {AB} ,如图18 所示,则速度瞬心必定在连线 {AB} 与速度矢 {\mathbf{v}}_{A} 和 {\mathbf{v}}_{B} 端点连线的交点 C 上 (参看图15b)。因此,欲确定图18 所示齿轮的速度瞬心 C 的位置,不仅需要知道 {v}_{A} 和 {v}_{B} 的方向,而且还需要知道它们的大小。
当 {v}_{A} 和 {v}_{B} 同向时,图形的速度瞬心 C 在 {AB} 的延长线上 (图18a);当 {v}_{A} 和 {v}_{B} 反向时,图形的速度瞬心 C 在 A\text{、}B 两点之间 (图18b)。
(4)某一瞬时,平面图形上 A 、 B 两点的速度相等,即 {v}_{A} = {v}_{B} 时,如图19 所示,图形的速度瞬心在无限远处。在该瞬时,图形上各点的速度分布如同图形做平移的情形一样,故称为瞬时平移。必须注意,此瞬时各点的速度虽然相同,但是加速度不同。
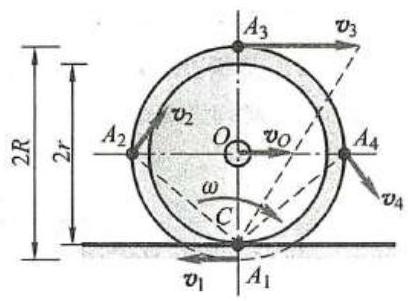
例6 车厢的轮子沿直线轨道滚动而无滑动,如图20 所示。已知车轮中心 O 的速度为 {v}_{o} 。如半径 R 和 r 都是已知的,求车轮上 {A}_{1}\text{、}{A}_{2}\text{、}{A}_{3}\text{、}{A}_{4} 各点的速度,其中点 {A}_{2}\text{、}O\text{、}{A}_{4} 三点在同一水平线上,点 {A}_{1}\text{、}O\text{、}{A}_{3} 三点在同一铅垂直线上。
图18
图19
图20
解: 因为车轮只滚动无滑动,故车轮与轨道的接触点 C 就是车轮的速度瞬心。令 \omega 为车轮绕速度瞬心转动的角速度,因 {v}_{0} = {r\omega } ,从而求得车轮的角速度的转向如图所示,大小为
\omega = \frac{{v}_{0}}{r}图20 中各点的速度分别计算如下:
{v}_{1} = {A}_{1}C \cdot \omega = \frac{R - r}{r}{v}_{0},\;{v}_{2} = {A}_{2}C \cdot \omega = \frac{\sqrt{{R}^{2} + {r}^{2}}}{r}{v}_{0}{v}_{3} = {A}_{3}C \cdot \omega = \frac{R + r}{r}{v}_{0},\;{v}_{4} = {A}_{4}C \cdot \omega = \sqrt{\frac{{R}^{2} + {r}^{2}}{r}}{v}_{0}这些速度的方向分别垂直于 {A}_{1}C\text{、}{A}_{2}C\text{、}{A}_{3}C 和 {A}_{4}C ,指向如图所示。

例7 用瞬心法解例1。
图21
解: 分别做点 A 和点 B 速度的垂线,两条直线的交点 C 就是平面图形 {AB} 的速度瞬心,如图21 所示。 于是平面图形的角速度为
\omega = \frac{{v}_{A}}{AC} = \frac{{v}_{A}}{l\sin \varphi }点 B 的速度为
{v}_{B} = {BC} \cdot \omega = \frac{BC}{AC}{v}_{A} = {v}_{A}\cot \varphi以上结果与例1 求得的完全一样。
用瞬心法也可以求平面图形内任一点的速度。例如,杆 {AB} 中点 D 的速度为
{v}_{D} = {DC} \cdot \omega = \frac{l}{2} \cdot \frac{{v}_{A}}{l\sin \varphi } = \frac{{v}_{A}}{2\sin \varphi }它的方向垂直于 {DC} ,且朝向图形转动的一方。
由以上各例可以看出,用瞬心法解题,其步骤与基点法类似。
前两步完全相同,只是第三步要根据已知条件,求出平面图形的速度瞬心的位置和平面图形转动的角速度,最后求出各点的速度。
如果需要研究由几个平面图形组成的平面机构,则可依次对每一个平面图形按上述步骤进行,直到求出所需的全部未知量为止。应该注意,每一个平面图形有它自己的速度瞬心和角速度,因此,每求出一个速度瞬心和角速度,应明确标出它是哪一个平面图形的速度瞬心和角速度,决不可混淆。
例8 矿石轧碎机的活动夹板 {AB} 长为 {600}\mathrm{\;{mm}} ,由曲柄 {OE} 借连杆组带动,使它绕 A 轴摆动,如图22 所示。曲柄 {OE} 长为 {100}\mathrm{\;{mm}} ,角速度为 {10}\mathrm{{rad}}/\mathrm{s} 。连杆组由杆 {BG}\text{、}{GD} 和杆 {GE} 组成,杆 {BG} 和杆 {GD} 长度均为 {500}\mathrm{\;{mm}} 。求当机构在图示位置时,夹板 {AB} 的角速度。
图22
解: 此机构由五个刚体组成,杆 {OE}\text{、}{GD} 和杆 {AB} 绕固定轴转动,杆 {GE} 和杆 {BG} 做平面运动。
欲求杆 {AB} 的角速度 {\omega }_{AB} ,必须先求出点 B 的速度大小,因为 {\omega }_{AB} = \frac{{v}_{B}}{AB} ;而欲求 {v}_{B} ,则应先求点 G 的速度。
杆 {GE} 做平面运动,点 E 的速度方向垂直于杆 {OE} ,点 G 在以点 D 为圆心的圆弧上运动,因此速度方向垂直于杆 {GD} 。作点 G\text{、}E 两点速度矢量的垂线,得交点 {C}_{1} ,这就是在图示瞬时杆 {GE} 的速度瞬心。
由图中几何关系知
{OG} = {800}\mathrm{\;{mm}} + {500}\mathrm{\;{mm}} \cdot \sin {15}^{ \circ } = {929.4}\mathrm{\;{mm}}E{C}_{1} = O{C}_{1} - {OE} = {OG} \cdot \cot {15}^{ \circ } - {OE} = {3369}\mathrm{\;{mm}}G{C}_{1} = \frac{OG}{\sin {15}^{ \circ }} = {3591}\mathrm{\;{mm}}于是,杆 {GE} 的角速度为
{\omega }_{GE} = \frac{{v}_{E}}{E{C}_{1}} = \frac{\omega \cdot {OE}}{E{C}_{1}} = {0.2968}\mathrm{{rad}}/\mathrm{s}点 G 的速度为
{v}_{G} = {\omega }_{GE} \cdot G{C}_{1} = {1.066}\mathrm{\;m}/\mathrm{s}杆 {BG} 也做平面运动,已知点 G 的速度大小和方向,并知点 B 的速度必垂直于杆 {AB} ,做两速度矢量的垂线交于点 {C}_{2} ,该点就是杆 {BG} 在图示瞬时的速度瞬心。按照上面的计算方法可求得
{\omega }_{BG} = \frac{{v}_{G}}{G{C}_{2}}{v}_{B} = {\omega }_{BC} \cdot B{C}_{2} = {v}_{G}\frac{B{C}_{2}}{G{C}_{2}} = {v}_{G}\cos {60}^{ \circ }{\omega }_{AB} = \frac{{v}_{B}}{AB} = \frac{{v}_{C}\cos {60}^{ \circ }}{AB} = {0.888}\mathrm{{rad}}/\mathrm{s}

由此可以看出:
(1)机构的运动都是通过各部件的连接点来传递的;
(2)在每一瞬时,机构中做平面运动的各刚体有各自的速度瞬心和角速度。
4 用基点法求平面图形内各点的加速度
根据 1 所述,如图23 所示平面图形 S 的运动可分解为两部分:
(1) 随同基点 A 的平移 (牵连运动);
(2) 绕基点 A 的转动 (相对运动)。
于是,平面图形内任一点 B 的运动也由两个运动合成,它的加速度可以用加速度合成定理求出。因为牵连运动为平移,点 B 的绝对加速度等于牵连加速度与相对加速度的矢量和。
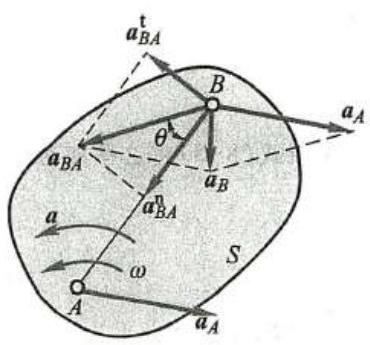
图23
由于牵连运动为平移,点 B 的牵连加速度等于基点 A 的加速度 {a}_{A} ;点 B 的相对加速度 {a}_{BA} 是该点随平面图形绕基点 A 转动的加速度,可分为切向加速度与法向加速度两部分。于是用基点法求点的加速度合成公式为
即平面图形内任一点的加速度等于基点的加速度与该点随平面图形绕基点转动的切向加速度和法向加速度的矢量和。
式( 5)中,{\mathbf{a}}_{BA}^{1} 为点 B 绕基点 A 转动的切向加速度,方向与 {AB} 垂直,大小为
\alpha 为平面图形的角加速度。 {\mathbf{a}}_{BA}^{n} 为点 B 绕基点 A 转动的法向加速度,指向基点 A ,大小为
\omega 为平面图形的角速度。
式 (5) 为平面内的矢量等式,通常可向两个相交的坐标轴投影,得到两个代数方程,用以求解两个未知量。
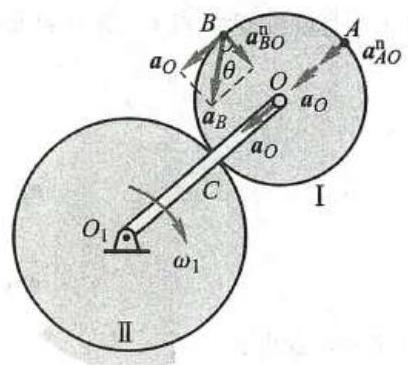
例9 如图24 所示,在外啮合行星齿轮机构中,系杆 {O}_{1}O = l ,以匀角速度 {\omega }_{1} 绕 {O}_{1} 轴转动。大齿轮 \mathrm{{II}} 固定,行星齿轮 \mathrm{I} 半径为 r ,在齿轮 \mathrm{{II}} 上只滚不滑。设点 A 和点 B 是轮缘上的两点,点 A 在 {O}_{1}O 的延长线上,而点 B 则在垂直于 {O}_{1}O 的半径上。求点 A 和点 B 的加速度。
图24
解: 齿轮 \mathrm{I} 做平面运动,其中心 O 的速度和加速度分别为
{v}_{0} = l{\omega }_{1},\;{a}_{0} = l{\omega }_{1}^{2}选点 O 作为基点。由题意知,齿轮 \mathrm{I} 的瞬心在两齿轮的接触点 C 处。设齿轮 \mathrm{I} 的角速度为 \omega ,有
\omega = \frac{{v}_{0}}{r} = \frac{l}{r}{\omega }_{1}因为 {\omega }_{1} 为不变的常量,所以 \omega 也是常量,则齿轮 \mathrm{I} 的角加速度等于零,于是有
{a}_{AO}^{1} = {a}_{BO}^{1} = 0A\text{、}B 两点相对于基点 O 的法向加速度分别沿半径 {OA} 和半径 {OB} ,指向中心 O ,它们的大小为
{a}_{AO}^{\mathrm{n}} = {a}_{BO}^{\mathrm{n}} = r{\omega }^{2} = \frac{{l}^{2}}{r}{\omega }_{1}^{2}按照式 (5) 将这些加速度与 {a}_{0} 合成,得点 A 的加速度的方向沿 {OA} ,指向中心 O ,它的大小为
{a}_{\lambda } = {a}_{0} + {a}_{\lambda 0}^{\mathrm{n}} = l{\omega }_{1}^{2} + \frac{{l}^{2}}{r}{\omega }_{1}^{2} = l{\omega }_{1}^{2}\left( {1 + \frac{l}{r}}\right)点 B 的加速度大小为
{a}_{B} = \sqrt{{a}_{O}^{2} + {\left( {a}_{BO}^{\mathrm{n}}\right) }^{2}} = l{\omega }_{1}^{2}\sqrt{1 + {\left( \frac{l}{r}\right) }^{2}}它与半径 {OB} 间的夹角为
\theta = \arctan \frac{{a}_{0}}{{a}_{B0}^{n}} = \arctan \frac{l{\omega }_{1}^{2}}{\frac{{l}^{2}}{r}{\omega }_{1}^{2}} = \arctan \frac{r}{l}
例10 如图25 所示,在椭圆规机构中,曲柄 {OD} 以匀角速度 \omega 绕 O 轴转动,{OD} = {AD} = {BD} = l 。求当 \varphi = {60}^{ \circ } 时,尺 {AB} 的角加速度和点 A 的加速度。
解: 先分析机构各部分的运动: 曲柄 {OD} 绕 O 轴转动,尺 {AB} 做平面运动。
取尺 {AB} 上的点 D 为基点,其加速度为
{a}_{D} = l{\omega }^{2}它的方向沿 {OD} 指向点 O 。
点 A 的加速度为
{\mathbf{a}}_{A} = {\mathbf{a}}_{D} + {\mathbf{a}}_{AD}^{\mathrm{t}} + {\mathbf{a}}_{AD}^{\mathrm{n}}图25
其中,{a}_{D} 的大小和方向及 {a}_{AD}^{n} 的大小和方向都是已知的。因为点 A 做直线运动,可设 {a}_{A} 的方向如图所示;{a}_{AD}^{1} 垂直于 {AD} ,其方向暂设如图所示。 {a}_{AD}^{n} 沿 {AD} 指向点 D ,它的大小为
{a}_{AD}^{n} = {\omega }_{AB}^{2} \cdot {AD}其中,{\omega }_{AB} 为尺 {AB} 的角速度,可用基点法或瞬心法求得
{\omega }_{AB} = \omega则
{a}_{AD}^{\mathrm{n}} = {\omega }^{2} \cdot {AD} = l{\omega }^{2}现在求两个未知量 {\mathbf{a}}_{A} 和 {\mathbf{a}}_{AD}^{1} 的大小。取 \xi 轴垂直于 {\mathbf{a}}_{AD}^{1} ,取 \eta 轴垂直于 {\mathbf{a}}_{A},\eta 和 \xi 的正方向如图所示。将 {\mathbf{a}}_{A} 的矢量合成式分别在 \xi 轴和 \eta 轴上投影,得
{a}_{A}\cos \varphi = {a}_{D}\cos \left( {\pi - {2\varphi }}\right) - {a}_{AD}^{\mathrm{n}}0 = - {a}_{D}\sin \varphi + {a}_{AD}^{\mathrm{t}}\cos \varphi + {a}_{AD}^{\mathrm{n}}\sin \varphi解得
{a}_{A} = \frac{{a}_{D}\cos \left( {\pi - {2\varphi }}\right) - {a}_{AD}^{\mathrm{n}}}{\cos \varphi } = \frac{{\omega }^{2}l\cos {60}^{ \circ } - {\omega }^{2}l}{\cos {60}^{ \circ }} = - l{\omega }^{2}{a}_{AD}^{\mathrm{t}} = \frac{{a}_{D}\sin \varphi - {a}_{AD}^{\mathrm{n}}\sin \varphi }{\cos \varphi } = \frac{\left( {{\omega }^{2}l - {\omega }^{2}l}\right) \sin \varphi }{\cos \varphi } = 0于是有
{\alpha }_{AB} = \frac{{a}_{AD}^{\prime }}{AD} = 0由于 {a}_{A} 为负值,故 {a}_{A} 的实际方向与原假设的方向相反。

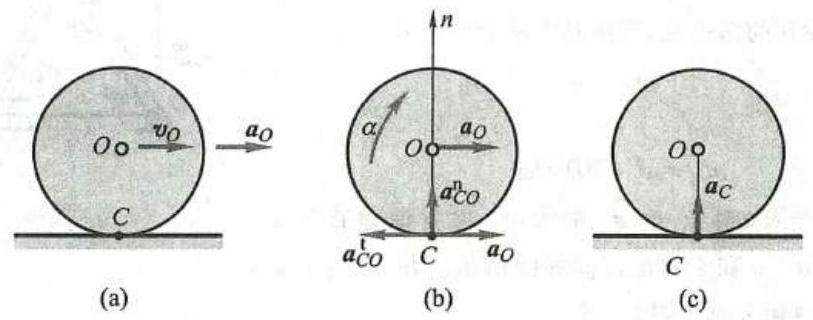
例11 车轮沿直线滚动,如图26a 所示。已知车轮半径为 R ,轮心 O 的速度为 {v}_{0} ,加速度为 {a}_{0} 。设车轮与地面接触无相对滑动。求车轮上速度瞬心的加速度。
解: 只滚不滑时,车轮的角速度可按下式计算:
\omega = \frac{{v}_{0}}{R}车轮的角加速度 \alpha 等于角速度对时间的一阶导数。上式对任何瞬时均成立,故可对时间求导,得
\alpha = \frac{\mathrm{d}\omega }{\mathrm{d}t} = \frac{\mathrm{d}}{\mathrm{d}t}\left( \frac{{v}_{0}}{R}\right)因为 R 是常量,所以有
\alpha = \frac{1}{R}\frac{\mathrm{d}{v}_{0}}{\mathrm{\;d}t}因为轮心 O 做直线运动,所以它的速度 {v}_{0} 对时间的一阶导数等于这一点的加速度 {a}_{0} 。于是有
\alpha = \frac{{a}_{0}}{R}车轮做平面运动。取轮心 O 为基点,按照式 (5) 求点 C 的加速度,即
{\mathbf{a}}_{c} = {\mathbf{a}}_{0} + {\mathbf{a}}_{co}^{\prime } + {\mathbf{a}}_{co}^{\mathrm{n}}式中
{a}_{CO}^{\prime } = {R\alpha } = {a}_{O},\;{a}_{CO}^{\mathrm{n}} = R{\omega }^{2} = \frac{{v}_{O}^{2}}{R}它们的方向如图26b 所示。
图26
由于 {\mathbf{a}}_{0} 与 {\mathbf{a}}_{C0}^{\mathrm{t}} 的大小相等,方向相反,于是有
{a}_{c} = {a}_{co}^{\mathrm{n}}由此可知,速度瞬心 C 的加速度不等于零。当车轮在地面上只滚不滑时,速度瞬心 C 的加速度指向轮心 O ,如图26c 所示。
由以上各例可见,用基点法求平面图形上点的加速度的步骤与用基点法求点的速度的步骤相同。但由于在公式 {a}_{B} = {a}_{A} + {a}_{BA}^{\mathrm{t}} + {a}_{BA}^{\mathrm{n}} 中有 8 个要素,因此必须已知其中 6 个,问题才是可解的。
例12 图27a 所示机构,滑块 B 通过连杆 {AB} 带动半径为 r 的齿轮 O 在固定齿条上做纯滚动。已知 {OA} = b,{AB} = {2b} ,图示瞬时 {OB} 水平,滑块 B 的速度 {v}_{B} = {v}_{0} (向上),加速度 {a}_{B} = {a}_{0} (向下)。求该瞬时齿轮 O 的角速度和角加速度。
图27
解: 齿轮 O 做平面运动,并通过连杆 {AB} 与滑块 B 相连,而连杆 {AB} 做平面运动。通过分析连杆 {AB} 的运动,由点 B 的已知条件求出点 A 的速度和加速度,就可以求得齿轮 O 的角速度和角加速度。
由于齿轮 O 沿固定齿条做纯滚动,其速度瞬心在接触点 C ,因而点 A 的速度沿水平方向,由此确定点 O 为连杆 {AB} 的速度瞬心,从而有
{\omega }_{AB} = \frac{{v}_{B}}{OB} = \frac{\sqrt{3}{v}_{0}}{3b},\;{v}_{A} = b{\omega }_{AB} = \frac{\sqrt{3}{v}_{0}}{3}齿轮 O 的角速度为
{\omega }_{0} = \frac{{v}_{A}}{b + r} = \frac{\sqrt{3}{v}_{0}}{3\left( {b + r}\right) }\text{ (逆时针) } \tag{a}以点 B 为基点,写出点 A 的加速度表达式为
{\mathbf{a}}_{A} = {\mathbf{a}}_{B} + {\mathbf{a}}_{AB}^{n} + {\mathbf{a}}_{AB}^{1} \tag{b}上式中包含 {a}_{A} 的大小、方向和 {a}_{AB}^{1} 的大小共 3 个未知量,还需要增加一个补充方程才能求解。
由例11 可知,齿轮中心点 O 的加速度与齿轮角加速度之间满足关系式:
\alpha = \frac{{a}_{0}}{r}选点 O 为基点,点 A 的加速度可以写成
{\mathbf{a}}_{A} = {\mathbf{a}}_{O} + {\mathbf{a}}_{AO}^{\mathrm{n}} + {\mathbf{a}}_{AO}^{\mathrm{t}} \tag{c}式(c)等号右端只有齿轮角加速度 \alpha 大小未知,将其代入式(b),有
{\mathbf{a}}_{B} + {\mathbf{a}}_{AB}^{\mathrm{n}} + {\mathbf{a}}_{AB}^{\mathrm{t}} = {\mathbf{a}}_{O} + {\mathbf{a}}_{AO}^{\mathrm{n}} + {\mathbf{a}}_{AO}^{\mathrm{t}}将上式沿 {AB} 方向投影 (图27b) 得
{a}_{B}\sin {30}^{ \circ } + {a}_{AB}^{\mathrm{n}} = \left( {{a}_{AO}^{\mathrm{t}} + {a}_{O}}\right) \cos {30}^{ \circ } + {a}_{AO}^{\mathrm{n}}\sin {30}^{ \circ }注意
{a}_{0} = {\alpha r},\;{a}_{AO}^{\mathrm{t}} = \alpha \cdot {AO} = {\alpha b}{a}_{AB}^{n} = {\omega }_{AB}^{2} \cdot {AB} = \frac{2}{3}\frac{{v}_{0}^{2}}{b},\;{a}_{AO}^{n} = {\omega }_{O}^{2} \cdot {AO} = \frac{b{v}_{0}^{2}}{3{\left( b + r\right) }^{2}}解得
\alpha = \frac{\sqrt{3}}{3\left( {r + b}\right) }\left\lbrack {{a}_{0} + \frac{4}{3}\frac{{v}_{0}^{2}}{b} - \frac{b{v}_{0}^{2}}{3{\left( b + r\right) }^{2}}}\right\rbrack \;\text{(顺时针)}
5 运动学综合应用举例
工程中的机构都是由数个物体 (简称构件) 组成的,各构件间通过联接点而传递运动。为分析机构的运动,首先要分清各构件都做什么运动,分清已知运动构件与所求运动构件之间运动的传递关系,然后通过计算运动关联点 (许多情况下等同于联接点) 的速度和加速度来建立两者之间的联系。
在分析关联点的运动时,如能找出其位置与时间的函数关系,则可直接建立运动方程,用解析方法求其运动全过程的速度和加速度。当难以建立点的运动方程,或只对机构某些瞬时位置的运动参数感兴趣时,可根据刚体各种不同运动的形式,确定此刚体的运动与其上一点运动的关系,并常用合成运动或平面运动的理论来分析相关的两个点在某瞬时的速度和加速度的联系。
平面运动理论用来分析同一平面运动刚体上两个不同点间的速度和加速度联系。当两个刚体相接触而有相对滑动时,则需用合成运动的理论分析这两个不同刚体上关联点的速度和加速度联系。两物体间有相互运动,虽不接触,但其关联点的运动也符合合成运动的关系。
复杂的机构中,可能同时有平面运动和点的合成运动问题,应注意分别分析、 综合应用有关理论。有时同一问题可用不同的方法分析,则应经过分析、比较后,选用较简便的方法求解。
下面通过几个例题说明这些方法的综合应用。
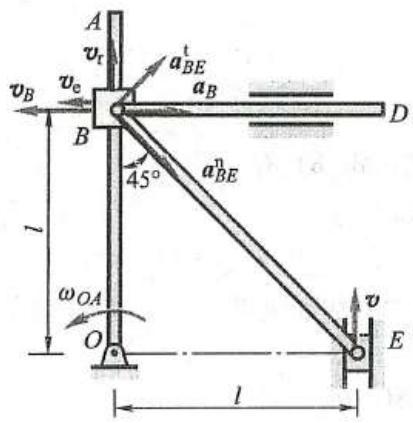
例13 图28 所示平面机构,滑块 B 可沿杆 {OA} 滑动。杆 {BE} 与杆 {BD} 分别与滑块 B 铰接,杆 {BD} 可沿水平导轨运动。滑块 E 以匀速度 \mathbf{v} 沿铅垂导轨向上运动,杆 {BE} 长为 \sqrt{2}l 。图示瞬时杆 {OA} 铅垂,且与杆 {BE} 的夹角为 {45}^{ \circ } 。求该瞬时杆 {OA} 的角速度与角加速度。
图28
图29
解: 杆 {BE} 做平面运动,可先求出点 B 的速度和加速度。点 B 连同滑块在杆 {OA} 上滑动,并带动杆 {OA} 转动,可按合成运动方法求解杆 {OA} 的角速度和角加速度。
杆 {BE} 做平面运动,在图28 中,由 v 及 {v}_{B} 方向可知此瞬时点 O 为杆 {BE} 的速度瞬心,因此,有
{\omega }_{BE} = \frac{v}{OE} = \frac{v}{l},\;{v}_{B} = {\omega }_{BE} \cdot {OB} = v以点 E 为基点,点 B 的加速度为
{a}_{B} = {a}_{E} + {a}_{BE}^{\mathrm{t}} + {a}_{BE}^{\mathrm{n}} \tag{a}式中,各矢量方向如图28 所示。由于点 E 做匀速直线运动,故 {a}_{E} = 0 。 {a}_{BE}^{n} 的大小为
{a}_{BE}^{\mathrm{n}} = {\omega }_{BE}^{2} \cdot {BE} = \frac{\sqrt{2}{v}^{2}}{l}将式 (a) 投影到沿 {BE} 方向的轴上,得
{a}_{B}\cos {45}^{ \circ } = {a}_{BE}^{n}因此,有
{a}_{B} = \frac{{a}_{BE}^{\mathrm{n}}}{\cos {45}^{ \circ }} = \frac{2{v}^{2}}{l}
上面用刚体平面运动方法求得了滑块 B 的速度和加速度。
由于滑块 B 可以沿杆 {OA} 滑动,因此应利用点的合成运动方法求杆 {OA} 的角速度及角加速度。
取滑块 B 为动点,动参考系固结在杆 {OA} 上,点的速度合成定理为
{v}_{\mathrm{a}} = {v}_{\mathrm{e}} + {v}_{\mathrm{r}}式中,{v}_{a} = {v}_{B} ;牵连速度 {v}_{c} 是杆 {OA} 上与滑块 B 重合那一点的速度,其方向垂直于杆 {OA} ,因此与 {v}_{\mathrm{a}} 同向;相对速度 {v}_{\mathrm{r}} 沿杆 {OA} ,即垂直于 {v}_{\mathrm{a}} 。显然有
{v}_{\mathrm{a}} = {v}_{\mathrm{e}},\;{v}_{\mathrm{r}} = 0即
{v}_{\mathrm{e}} = {v}_{\mathrm{B}} = v于是得杆 {OA} 的角速度为
{\omega }_{OA} = \frac{{v}_{\mathrm{e}}}{OB} = \frac{v}{l}其转向如图28 所示。
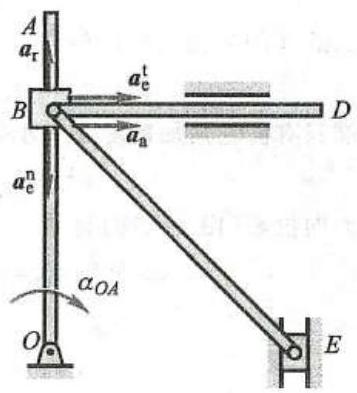
滑块 B 的绝对加速度 {a}_{\mathrm{a}} = {a}_{B} ,其牵连加速度有法向及切向两项,其法向部分为
{a}_{\mathrm{e}}^{\mathrm{n}} = {\omega }_{OA}^{2} \cdot {OB} = \frac{{v}^{2}}{l}由于滑块 B 的相对运动是沿杆 {OA} 的直线运动,因此其相对加速度 a ,也沿 {OA} 方向。这样,有
{\mathbf{a}}_{\mathrm{a}} = {\mathbf{a}}_{\mathrm{e}}^{1} + {\mathbf{a}}_{\mathrm{e}}^{\mathrm{n}} + {\mathbf{a}}_{\mathrm{r}} + {\mathbf{a}}_{\mathrm{C}} \tag{b}因为此瞬时 {v}_{\mathrm{r}} = 0 ,故 {a}_{\mathrm{C}} = 0 。在此矢量式中,各矢量方向已知,如图29 所示;未知量为 {a}_{\mathrm{r}} 的大小及 {\mathbf{a}}_{\mathrm{e}}^{\prime } 的大小,共两个。将式 (b) 投影到与 {\mathbf{a}}_{\mathrm{r}} 垂直的 {BD} 线上,得
{a}_{\mathrm{n}} = {a}_{\mathrm{e}}^{\prime }因此,有
{a}_{\mathrm{e}}^{\mathrm{t}} = {a}_{B} = \frac{2{v}^{2}}{l}杆 {OA} 的角加速度为
{\alpha }_{OA} = \frac{{a}_{\mathrm{e}}^{1}}{OB} = \frac{2{v}^{2}}{{l}^{2}}角加速度方向如图29 所示。
上面的求解方法是依次应用刚体平面运动方法及点的合成运动方法求解,这是机构运动分析中较常用的方法。
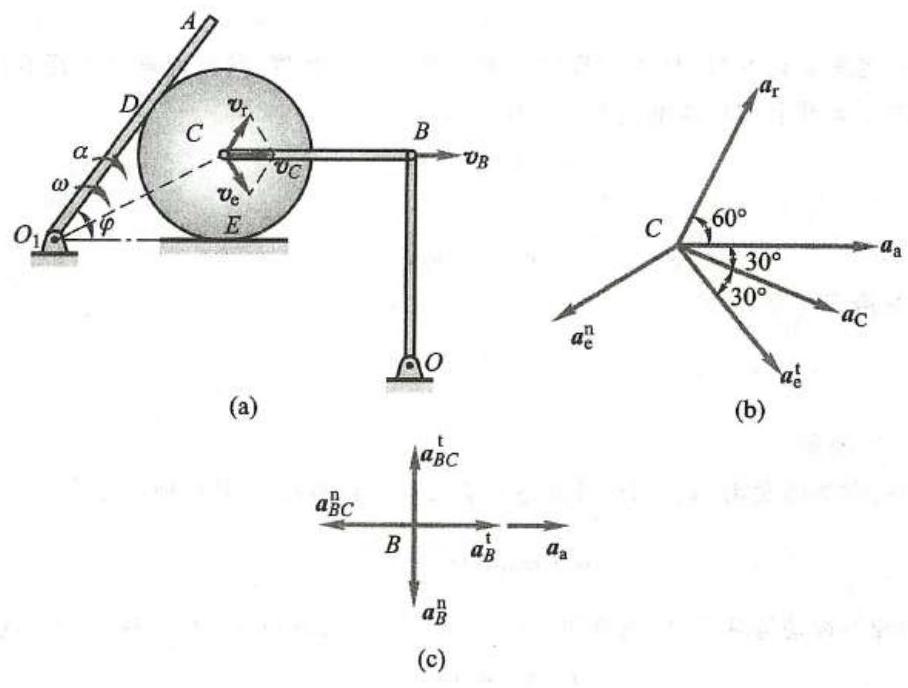
例14 图30a 所示平面机构,圆盘 C 半径为 R ,沿水平面做纯滚动,杆 {BC} 水平,杆 {OB} 铅垂,且 {BC} = {OB} = {2R},O\text{、}B\text{、}C\text{、}{O}_{1} 均为铰链,杆 {O}_{1}A 保持和圆盘 C 光滑接触。图示瞬时杆 {O}_{1}A 与水平线夹角 \varphi = {60}^{ \circ } ,角速度为 \omega ,角加速度为 \alpha ,皆为顺时针转向。求此瞬时圆盘 C 的角加速度 {\alpha }_{c} 和杆 {OB} 的角加速度 {\alpha }_{OB} 。
解: 先分析机构各构件之间的运动传递关系。杆 {O}_{1}A 通过光滑接触推动圆盘 C 运动,而圆盘 C 则通过杆 {BC} 将运动传递到杆 {OB} 。
对于杆 {O}_{1}A 和圆盘 C 之间的接触传动,可采用点的合成运动方法分析。注意圆盘 C 和杆 {O}_{1}A 之间接触点的相对运动轨迹复杂,故而取圆盘中心 C 为动点,杆 {O}_{1}A 为动参考系,相对运动为沿与杆 {O}_{1}A 平行方向的直线运动。由点的速度合成定理:
{\mathbf{v}}_{c} = {\mathbf{v}}_{\mathrm{e}} + {\mathbf{v}}_{\mathrm{r}}得
{v}_{c} = {v}_{\mathrm{r}} = {v}_{\mathrm{e}} = {2\omega R}图30
由加速度合成定理,点 C 的绝对加速度为
{a}_{\mathrm{n}} = {a}_{\mathrm{e}}^{\mathrm{t}} + {a}_{\mathrm{e}}^{\mathrm{n}} + {a}_{\mathrm{r}} + {a}_{\mathrm{C}}向 {\mathbf{a}}_{\mathrm{c}} 方向投影 (图30b),得
{a}_{\mathrm{a}}\cos {30}^{ \circ } = {a}_{\mathrm{c}}^{\mathrm{t}}\cos {30}^{ \circ } - {a}_{\mathrm{c}}^{\mathrm{n}}\sin {30}^{ \circ } + {2\omega }{v}_{\mathrm{r}}从而有
{a}_{\mathrm{a}} = {2\alpha R} + 2\sqrt{3}{\omega }^{2}R圆盘 C 的角加速度为
{\alpha }_{c} = \frac{{a}_{0}}{R} = {2\alpha } + 2\sqrt{3}{\omega }^{2}\;\text{(顺时针)}杆 {BC} 做平面运动,在图示瞬时,点 B 与点 C 的速度方向均沿水平方向,因此该瞬时杆 {BC} 做瞬时平移,有
{\omega }_{BC} = 0,\;{v}_{B} = {v}_{C} = {2\omega R}得
{\omega }_{OB} = \frac{{v}_{B}}{2R} = \omega以点 C 为基点,分析点 B 的加速度:
{a}_{B}^{\mathrm{t}} + {a}_{B}^{\mathrm{n}} = {a}_{\mathrm{n}} + {a}_{BC}^{\mathrm{t}} + {a}_{BC}^{\mathrm{n}}其中只有 {\mathbf{a}}_{B}^{1} 的大小和 {\mathbf{a}}_{BC}^{1} 的大小未知。注意 {\mathbf{a}}_{BC}^{n} = 0 ,沿 {\mathbf{a}}_{\mathrm{a}} 方向投影 (图30c),有
{a}_{B}^{1} = {a}_{\mathrm{a}} = {2\alpha R} + 2\sqrt{3}{\omega }^{2}R从而有
{\alpha }_{OB} = \frac{{a}_{B}^{\prime }}{2R} = \alpha + \sqrt{3}{\omega }^{2}\text{ (顺时针) }
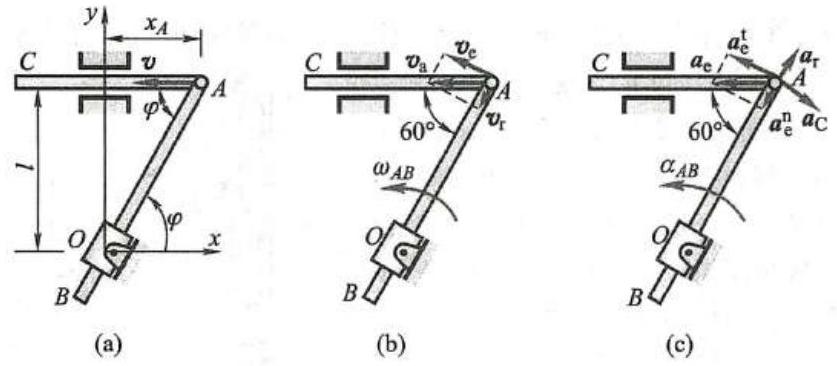
例15 在图31a 所示平面机构中,杆 {AC} 在导轨中以匀速度 v 平移,通过铰链 A 带动杆 {AB} 沿导套 O 运动,导套 O 与杆 {AC} 的距离为 l 。图示瞬时杆 {AB} 与杆 {AC} 的夹角 \varphi = {60}^{ \circ } ,求此瞬时杆 {AB} 的角速度及角加速度。
解: 本题可以用几种方法求解。
方法 1:
以点 A 为动点,动参考系固结在导套 O 上,牵连运动为绕 O 轴的转动。点 A 的绝对运动为以匀速度 v 沿杆 {AC} 方向的运动,相对运动是点 A 沿导套 O 的运动,各速度矢如图31b 所示。由
{\mathbf{v}}_{\mathrm{a}} = {\mathbf{v}}_{\mathrm{e}} + {\mathbf{v}}_{\mathrm{r}} = \mathbf{v}可得
{v}_{\mathrm{e}} = {v}_{\mathrm{a}}\sin {60}^{ \circ } = \frac{\sqrt{3}}{2}v,\;{v}_{\mathrm{r}} = {v}_{\mathrm{a}}\cos {60}^{ \circ } = \frac{v}{2}图31
由于杆 {AB} 在导套 O 中滑动,因此杆 {AB} 与导套 O 具有相同的角速度及角加速度。其角速度为
{\omega }_{AB} = \frac{{v}_{\mathrm{e}}}{AO} = \frac{3v}{4l}由于点 A 为匀速直线运动,故绝对加速度为零。点 A 的相对运动为沿导套 O 的直线运动,因此 {a}_{\mathrm{r}} 沿杆 {AB} 方向,故有
0 = {a}_{\mathrm{e}}^{\mathrm{t}} + {a}_{\mathrm{e}}^{\mathrm{n}} + {a}_{\mathrm{r}} + {a}_{\mathrm{C}} \tag{a}式中 {\mathbf{a}}_{\mathrm{c}} = 2{\mathbf{\omega }}_{\mathrm{e}} \times {\mathbf{v}}_{\mathrm{r}} ,其方向如图 {31}\mathrm{c} 所示,大小为
{a}_{\mathrm{C}} = 2{\omega }_{\mathrm{e}}{v}_{\mathrm{r}} = \frac{3{v}^{2}}{4l}{\mathbf{a}}_{\mathrm{e}}^{\mathrm{t}},{\mathbf{a}}_{\mathrm{e}}^{\mathrm{n}} 及 {\mathbf{a}}_{\mathrm{r}} 的方向如图31c 所示。将矢量方程式 (a) 投影到 {\mathbf{a}}_{\mathrm{e}}^{\mathrm{t}} 方向,得
{a}_{\mathrm{e}}^{\mathrm{t}} = {a}_{\mathrm{C}} = \frac{3{v}^{2}}{4l}杆 {AB} 的角加速度方向如图31c 所示,大小为
{\alpha }_{AB} = \frac{{a}_{\mathrm{e}}^{\mathrm{t}}}{AO} = \frac{3\sqrt{3}{v}^{2}}{8{l}^{2}}方法 2:
以点 O 为坐标原点,建立如图31a 所示的直角坐标系。由图可知
{x}_{A} = l\cot \varphi将其两端对时间 t 求导,并注意到 {\dot{x}}_{A} = - v ,得
\dot{\varphi } = \frac{v}{l}{\sin }^{2}\varphi \tag{b}将其再对时间 t 求导,得
\ddot{\varphi } = \frac{v\dot{\varphi }}{l}\sin {2\varphi } = \frac{{v}^{2}}{{l}^{2}}{\sin }^{2}\varphi \sin {2\varphi } \tag{c}式 (b) 及式 (c) 为杆 {AB} 的角速度 \dot{\varphi } 及角加速度 \ddot{\varphi } 与角 \varphi 之间的关系式。当 \varphi = {60}^{ \circ } 时,得
{\omega }_{AB} = \dot{\varphi } = \frac{3v}{4l},\;{\alpha }_{AB} = \ddot{\varphi } = \frac{3\sqrt{3}{v}^{2}}{8{l}^{2}}两种解法结果相同。
此题中,杆 {AB} 做平面运动,杆 {AB} 上与点 O 相重合一点的速度应沿杆 {AB} 方向。因此,也可应用瞬心法求解杆 {AB} 的角速度。然而,再用平面运动基点法求解杆 {AB} 的角加速度就不如前两种方法方便了。
例16 图32 所示平面机构,杆 {AB} 长为 l ,滑块 A 可沿摇杆 {OC} 的导槽滑动。摇杆 {OC} 以匀角速度 \omega 绕轴 O 转动,滑块 B 以匀速 v = {l\omega } 沿水平导轨滑动。图示瞬时摇杆 {OC} 铅垂,杆 {AB} 与水平线 {OB} 的夹角为 {30}^{ \circ } 。求此瞬时杆 {AB} 的角速度及角加速度。
图32
解: 杆 {AB} 做平面运动,点 A 又在摇杆 {OC} 内有相对运动,这是一种应用刚体平面运动方法和点的合成运动方法联合求解的问题,而且是一种含 \omega 和 \mathbf{v} 两个运动输入量的较复杂的机构运动问题。
杆 {AB} 做平面运动,以点 B 为基点,有
{\mathbf{v}}_{A} = {\mathbf{v}}_{B} + {\mathbf{v}}_{AB} \tag{a}点 A 在摇杆 {OC} 内滑动,因此需用点的合成运动方法求解。取点 A 为动点,动参考系固结在摇杆 {OC} 上,有
{v}_{n} = {v}_{e} + {v}_{r} \tag{b}其中绝对速度 {v}_{\mathrm{a}} = {v}_{A} ,而牵连速度 {v}_{\mathrm{e}} = {OA} \cdot \omega = \frac{l\omega }{2} ,相对速度 {v}_{\mathrm{r}} 大小未知,各速度矢方向如图32 所示。
由式 (a) 和式 (b) ,得
{\mathbf{v}}_{B} + {\mathbf{v}}_{AB} = {\mathbf{v}}_{\mathrm{e}} + {\mathbf{v}}_{\mathrm{r}} \tag{c}其中 {v}_{B} = v 为已知,{v}_{c} 已求得,且 {v}_{AB} 和 {v}_{r} 方向已知,仅有 {v}_{AB} 及 {v}_{r} 两个量的大小未知,故可解。 将矢量方程式 (c) 沿 {v}_{B} 方向投影,得
{v}_{B} - {v}_{AB}\sin {30}^{ \circ } = {v}_{0}故
{v}_{AB} = 2\left( {{v}_{B} - {v}_{\mathrm{e}}}\right) = {l\omega }杆 {AB} 的角速度方向如图32 所示,大小为
{\omega }_{AB} = \frac{{v}_{AB}}{AB} = \omega将式 (c) 沿 {v}_{\mathrm{r}} 方向投影,得
{v}_{AB}\cos {30}^{ \circ } = {v}_{\mathrm{r}}故
{v}_{\mathrm{r}} = \frac{\sqrt{3}}{2}{l\omega }以点 B 为基点,则点 A 的加速度为
{\mathbf{a}}_{A} = {\mathbf{a}}_{B} + {\mathbf{a}}_{AB}^{\mathrm{t}} + {\mathbf{a}}_{AB}^{\mathrm{n}} \tag{d}因为 {\mathbf{v}}_{B} 为常量,所以 {a}_{B} = 0 ,而
{a}_{AB}^{\mathrm{n}} = {\omega }_{AB}^{2} \cdot {AB} = l{\omega }^{2}仍以点 A 为动点,动参考系固结于摇杆 {OC} 上,则有
{a}_{\mathrm{n}} = {a}_{\mathrm{c}}^{\mathrm{n}} + {a}_{\mathrm{c}}^{\mathrm{t}} + {a}_{\mathrm{r}} + {a}_{\mathrm{C}} \tag{e}式中
{\mathbf{a}}_{\mathrm{a}} = {\mathbf{a}}_{A},\;{a}_{\mathrm{e}}^{\mathrm{t}} = 0{a}_{\mathrm{c}}^{\mathrm{n}} = {\omega }^{2} \cdot {OA} = \frac{l{\omega }^{2}}{2},\;{a}_{\mathrm{C}} = {2\omega }{v}_{\mathrm{r}} = \sqrt{3}l{\omega }^{2}由式 (d)、式 (e),得
{a}_{AB}^{1} + {a}_{AB}^{\mathrm{n}} = {a}_{\mathrm{e}}^{\mathrm{n}} + {a}_{\mathrm{r}} + {a}_{\mathrm{C}} \tag{f}其中各矢量方向已知,如图33 所示,仅有两个未知量 {a}_{\mathrm{r}} 及 {a}_{AB}^{\mathrm{r}} 的大小待求。取投影轴垂直于 {a}_{\mathrm{r}} ,沿 {a}_{\mathrm{c}} 方向,将矢量方程式 ( \mathrm{f} ) 在此轴上投影,得
{a}_{AB}^{\mathrm{t}}\sin {30}^{ \circ } - {a}_{AB}^{\mathrm{n}}\cos {30}^{ \circ } = {a}_{\mathrm{C}}图33
因此,有
{a}_{AB}^{\mathrm{t}} = 3\sqrt{3}l{\omega }^{2}由此得杆 {AB} 的角加速度为
{\alpha }_{AB} = \frac{{a}_{AB}^{1}}{AB} = 3\sqrt{3}{\omega }^{2}方向如图33 所示。
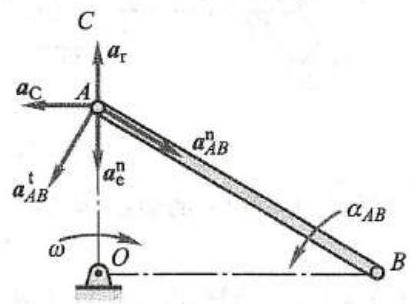
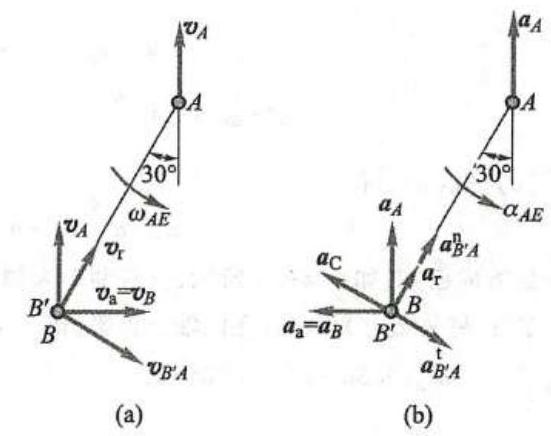
例17 在图34 所示平面机构中,杆 {AC} 沿铅垂方向运动,杆 {BD} 沿水平方向运动,A 为铰链,滑块 B 可沿杆 {AE} 中的导槽滑动。图示瞬时,{AB} = {60}\mathrm{\;{mm}},\theta = {30}^{ \circ },{v}_{A} = {10}\sqrt{3}\mathrm{\;{mm}}/\mathrm{s},{a}_{A} = {10}\sqrt{3}\mathrm{\;{mm}}/{\mathrm{s}}^{2},{v}_{B} = {50}\mathrm{\;{mm}}/\mathrm{s},{a}_{B} = {10}\mathrm{\;{mm}}/{\mathrm{s}}^{2} 。求该瞬时杆 {AE} 的角速度、角加速度及滑块 B 相对杆 {AE} 的加速度。
解: 以滑块 B 为动点,动参考系固结在杆 {AE} 上,有
{v}_{\mathrm{a}} = {v}_{\mathrm{e}} + {v}_{\mathrm{r}} \tag{a}式中,{v}_{\mathrm{a}} = {v}_{B};{v}_{\mathrm{r}} 方向沿杆 {AE} ,大小未知;{v}_{\mathrm{e}} 为杆 {AE} 上与滑块 B 重合的点 {B}^{\prime } 的速度,{v}_{\mathrm{e}} = {v}_{{B}^{\prime }} ,其大小和方向均未知。可见,式 (a) 中有三个待求量,无法做出速度平行四边形。
杆 {AE} 做平面运动,以点 A 为基点,点 {B}^{\prime } 的速度为
{\mathbf{v}}_{{B}^{\prime }} = {\mathbf{v}}_{A} + {\mathbf{v}}_{{B}^{\prime }A} \tag{b}其中,{\mathbf{v}}_{A} 已知;{\mathbf{v}}_{{B}^{\prime }A} 方向垂直于杆 {AE} ,大小未知;{\mathbf{v}}_{B} . 大小、方向均未知。显然,仅用式 (b) 也无法求解。由于 {v}_{{B}^{\prime }} = {v}_{e} ,因此将式 (a) 、式 (b) 联立即可求解。将式 (b) 代入式 (a),得
{\mathbf{v}}_{B} = {\mathbf{v}}_{A} + {\mathbf{v}}_{{B}^{\prime }A} + {\mathbf{v}}_{r} \tag{c}其中只有 {v}_{{B}^{\prime }A} 及 {v}_{r} 两个量的大小未知,可解。各速度矢如图35a 所示。将式 (c) 分别投影到
图中 {\mathbf{v}}_{{B}^{\prime }A} 及 {\mathbf{v}}_{\mathrm{r}} 方向,得
{v}_{B}\cos {30}^{ \circ } = - {v}_{A}\cos {60}^{ \circ } + {v}_{{B}^{\prime }A}{v}_{B}\sin {30}^{ \circ } = {v}_{A}\sin {60}^{ \circ } + {v}_{\mathrm{r}}解得
{v}_{{B}^{\prime }A} = {30}\sqrt{3}\mathrm{\;{mm}}/\mathrm{s},\;{v}_{\mathrm{r}} = {10}\mathrm{\;{mm}}/\mathrm{s}从而得杆 {AE} 的角速度为
{\omega }_{AE} = \frac{{v}_{{B}^{\prime }A}}{AB} = \frac{{30}\sqrt{3}\mathrm{\;{mm}}/\mathrm{s}}{{60}\mathrm{\;{mm}}} = {0.866}\mathrm{{rad}}/\mathrm{s}其方向如图35a 所示。
图34
图35
选用与上面相同的动点、动参考系,由点的合成运动加速度合成定理,有
{a}_{\mathrm{a}} = {a}_{\mathrm{c}} + {a}_{\mathrm{r}} + {a}_{\mathrm{C}} \tag{d}其中,{a}_{\mathrm{n}} = {a}_{B};{a}_{\mathrm{e}} 为杆 {AE} 上与滑块 B 重合的点 {B}^{\prime } 的加速度,{a}_{\mathrm{e}} = {a}_{{B}^{\prime }} ,其大小和方向均未知;{a}_{\mathrm{r}} 方向沿杆 {AE} ,大小未知;{a}_{\mathrm{c}} = 2{\omega }_{\mathrm{e}} \times {v}_{\mathrm{r}} ,方向如图35b 所示,大小为
{a}_{\mathrm{c}} = 2{\omega }_{AE}{v}_{\mathrm{r}} = 2 \times \frac{\sqrt{3}}{2}\mathrm{{rad}}/\mathrm{s} \times {10}\mathrm{\;{mm}}/\mathrm{s} = {17.32}\mathrm{\;{mm}}/{\mathrm{s}}^{2}可见式 (d) 有三个待求量,不能求解。
杆 {AE} 做平面运动,以点 A 为基点,有
{\mathbf{a}}_{{B}^{\prime }} = {\mathbf{a}}_{A} + {\mathbf{a}}_{{B}^{\prime }A}^{\mathrm{t}} + {\mathbf{a}}_{{B}^{\prime }A}^{\mathrm{n}} \tag{e}式中
{a}_{{B}^{\prime }A}^{\mathrm{n}} = {\omega }_{AE}^{2} \cdot {AB} = {\left( \frac{\sqrt{3}}{2}\mathrm{{rad}}/\mathrm{s}\right) }^{2} \times {60}\mathrm{\;{mm}} = {45}\mathrm{\;{mm}}/{\mathrm{s}}^{2}由于 {a}_{{B}^{\prime }} = {a}_{\mathrm{e}} ,将式(e)代入式(d),得
{\mathbf{a}}_{B} = {\mathbf{a}}_{A} + {\mathbf{a}}_{{B}^{\prime }A}^{\prime } + {\mathbf{a}}_{{B}^{\prime }A}^{\mathrm{n}} + {\mathbf{a}}_{\mathrm{r}} + {\mathbf{a}}_{\mathrm{C}} \tag{f}各加速度矢量如图35b 所示。式(f) 中只有 {\mathbf{a}}_{{B}^{\prime }A}^{\mathrm{t}} 及 {\mathbf{a}}_{r} 两个加速度的大小未知,可求。将式 (f) 分别投影到 {\mathbf{a}}_{{B}^{\prime }A}^{1} 及 {\mathbf{a}}_{\mathrm{r}} 两个方向上,得
- {a}_{B}\cos {30}^{ \circ } = - {a}_{A}\sin {30}^{ \circ } + {a}_{{B}^{\prime }A}^{\prime } - {a}_{\mathrm{C}}- {a}_{B}\sin {30}^{ \circ } = {a}_{A}\cos {30}^{ \circ } + {a}_{{B}^{\prime }A}^{\mathrm{n}} + {a}_{\mathrm{r}}由此得
{a}_{{B}^{\prime }A}^{\mathrm{t}} = {17.32}\mathrm{\;{mm}}/{\mathrm{s}}^{2},\;{a}_{\mathrm{r}} = - {65}\mathrm{\;{mm}}/{\mathrm{s}}^{2}杆 {AE} 的角加速度为
{\alpha }_{AE} = \frac{{a}_{{B}^{\prime }A}^{\mathrm{t}}}{AB} = {0.288}\;7\mathrm{{rad}}/{\mathrm{s}}^{2}其方向如图35b 所示。
从上面的例题可以看出:
某些问题可以用多种方法求解,某些问题必须同时采用几种方法联合求解。解题时应该注意,只有已知条件适用于运动全过程时,才能建立点的运动方程,进行微积分运算,用解析法求解。
在例15 中,杆 {AC} 以匀速度 v 平移是适用于运动全过程的条件,因此可以用点的运动学方法,通过运动方程及微分运算求解。
在例17 中,所给已知条件是图示瞬时的,不是全过程的条件,因此无法用点的运动学方法求解。
例16 所给条件也适用于全过程,因此也可以用点的运动学方法求解。