刚体是由无数点组成的,在点的运动学基础上可研究刚体整体的运动及其与刚体上各点运动之间的关系。
刚体的两种简单运动——平移和定轴转动。
1 刚体的平行移动
工程中某些物体的运动,例如,汽缸内活塞的运动、车床上刀架的运动等,它们有一个共同的特点,即如果在物体内任取一直线段,在运动过程中这条直线段始终与它的最初位置平行,这种运动称为平行移动,简称平移。
设刚体做平移。如图 1 所示,在刚体内任选两点 A 和 B ,令点 A 的矢径为 {\mathbf{r}}_{A} ,点 B 的矢径为 {\mathbf{r}}_{B} ,则两条矢端曲线就是两点的运动轨迹。由图可知
当刚体平移时,线段 {BA} 的长度和方向都不改变,所以 \overrightarrow{BA} 是常矢量。因此只要把点 B 的运动轨迹沿 \overrightarrow{BA} 方向平行搬移一段距离 {BA} ,就能与点 A 的运动轨迹完全重合。刚体平移时,其上各点的运动轨迹不一定是直线,也可能是曲线,但是它们的形状是完全相同的。
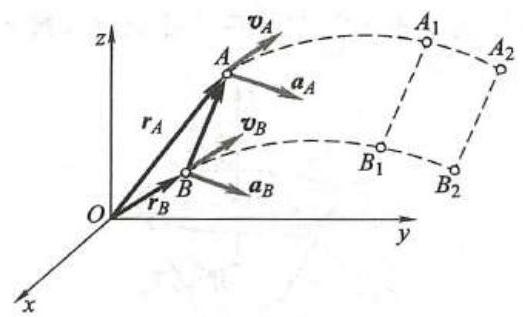
图 1
把上式对时间 t 求导数,因为常矢量 \overrightarrow{BA} 的导数等于零,于是得
其中,{v}_{A} 和 {v}_{B} 分别表示点 A 和点 B 的速度,{a}_{A} 和 {a}_{B} 分别表示它们的加速度。因为点 A 和点 B 是任意选择的,因此可得结论: 当刚体平移时,其上各点的运动轨迹形状相同;在每一瞬时,各点的速度相同,加速度也相同。
因此,研究刚体的平移,可以归结为研究刚体内任一点 (如质心) 的运动,也就是归结为点的运动学问题。
2 刚体绕定轴的转动
工程中最常见的齿轮、机床的主轴、电机的转子等,它们都有一条固定的轴线,物体绕此固定轴转动。显然,只要轴线上有两点是不动的,这条轴线就是固定的。 刚体在运动时,其上或其扩展部分有两点保持不动,则这种运动称为刚体绕定轴的转动,简称刚体的转动。通过这两个固定点的一条不动的直线,称为刚体的转轴或轴线,简称轴。
为确定转动刚体的位置,取其转轴为 z 轴,正向如图 2 所示。通过轴线做一固定平面 A ,此外,通过轴线再做一动平面 B ,这个平面与刚体固结,一起转动。两个平面间的夹角用 \varphi 表示,称为刚体的转角。转角 \varphi 是一个代数量,它确定了刚体的位置,它的符号规定如下:自 z 轴的正端往负端看,从固定面起按逆时针转向计算角 \varphi ,取正值; 按顺时针转向计算角 \varphi ,取负值,并用弧度 (rad) 表示。当刚体转动时,转角 \varphi 是时间 t 的单值连续函数,即
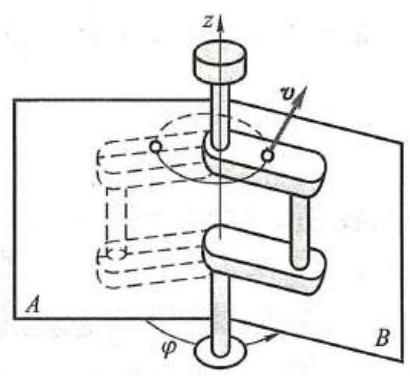
图 2
这个方程称为刚体绕定轴转动的运动方程。绕定轴转动的刚体,只要用一个参变量 (转角 \varphi ) 就可以决定它的位置,这样的刚体,称它具有一个自由度。
转角 \varphi 对时间的一阶导数,称之为刚体的瞬时角速度,并用字母 \omega 表示,即
角速度表征刚体转动的快慢和方向,其单位一般为 \mathrm{{rad}}/\mathrm{s} 。
角速度是代数量。从轴的正端向负端看,刚体逆时针转动时,角速度取正值,反之取负值。
角速度对时间的一阶导数,称之为刚体的瞬时角加速度,用字母 \alpha 表示,即
角加速度表征角速度变化的快慢,其单位一般为 \mathrm{{rad}}/{\mathrm{s}}^{2} 。
角加速度也是代数量。
如果 \omega 与 \alpha 同号,则转动是加速的; 如果 \omega 与 \alpha 异号,则转动是减速的。
现在讨论两种特殊情形。
(1) 匀速转动
如果刚体的角速度不变,即 \omega 为常量,这种转动称为匀速转动。仿照点的匀速运动公式,可得
其中,{\varphi }_{0} 是 t = 0 时转角 \varphi 的值。
机器中的转动部件或零件,一般都在匀速转动情况下工作。转动的快慢常用每分钟转数 n 来表示,其单位为 \mathrm{r}/\mathrm{{min}} ,称为转速。例如,车床主轴的转速为 12.5 ~ 1 200 r/min,汽轮机的转速约为 {3000}\mathrm{r}/\mathrm{{min}} 等。
角速度 \omega 与转速 n 的关系为
式中,转速 n 的单位为 \mathrm{r}/\min ,\omega 的单位为 \mathrm{{rad}}/\mathrm{s} 。在粗略的近似计算中,可取 \pi \approx 3 ,于是 \omega \approx {0.1n} 。
(2)匀变速转动
如果刚体的角加速度不变,即 \alpha 为常量,这种转动称为匀变速转动。仿照点的匀变速运动公式,可得
式中,{\omega }_{0} 和 {\varphi }_{0} 分别是 t = 0 时的角速度和转角。
由上面一些公式可知: 匀变速转动时,刚体的角速度、转角和时间之间的关系与点在匀变速运动中的速度、坐标和时间之间的关系相似。
3 转动刚体内各点的速度和加速度
当刚体绕定轴转动时,刚体内任意一点都做圆周运动,圆心在轴线上,圆周所在的平面与轴线垂直,圆周的半径 R 等于该点到轴线的垂直距离,对此,宜采用自然法研究各点的运动。
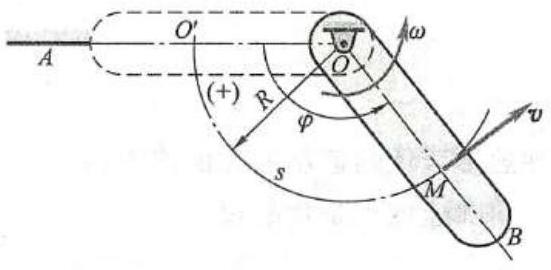
图 3
设刚体由定平面 A 绕定轴 O 转动任一角度 \varphi 到达 B 位置,其上任一点由点 {O}^{\prime } 运动到点 M ,如图 3 所示。以固定点 {O}^{\prime } 为弧坐标 s 的原点,按 \varphi 角的正向规定弧坐标 s 的正向,于是,有
式中,R 为点 M 到轴心 O 的距离。
将上式对 t 取一阶导数,得
由于 \frac{\mathrm{d}\varphi }{\mathrm{d}t} = \omega ,\frac{\mathrm{d}s}{\mathrm{\;d}t} = v ,因此,上式可写成
即转动刚体内任一点的速度的大小,等于刚体的角速度与该点到轴线的垂直距离的乘积,它的方向沿圆周的切线而指向转动的一方。
用一垂直于轴线的平面横截刚体,得一截面。根据上述结论,在该截面上的任一条通过轴心的直线上,各点的速度按线性规律分布,如图 4b 所示。将速度矢的端点连成直线,此直线通过轴心。在该截面上,不在一条直线上的各点的速度方向,如图 4a 所示。
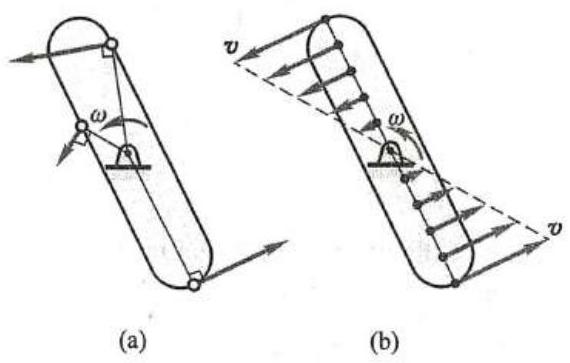
图 4
现在求点 M 的加速度。由于点做圆周运动,因此应求切向加速度和法向加速度。根据弧长 s 与转角 \varphi 的关系,得
由于 \ddot{\varphi } = \alpha ,因此,有
即转动刚体内任一点的切向加速度 (又称转动加速度) 的大小,等于刚体的角加速度与该点到轴线垂直距离的乘积,它的方向由角加速度的符号决定。当 \alpha 是正值时,它沿圆周的切线并指向角 \varphi 的正向; 否则相反。
法向加速度为
式中,\rho 是曲率半径,对于圆,\rho = R ,因此,有
即转动刚体内任一点的法向加速度 (又称向心加速度) 的大小,等于刚体角速度的平方与该点到轴线的垂直距离的乘积,它的方向与速度垂直并指向轴线。
如果 \omega 与 \alpha 同号,角速度的绝对值增加,刚体做加速转动,这时点的切向加速度 {\mathbf{a}}_{\mathrm{t}} 与速度 \mathbf{v} 的指向相同; 如果 \omega 与 \alpha 异号,刚体做减速转动,{\mathbf{a}}_{\mathrm{t}} 与 \mathbf{v} 的指向相反。这两种情况分别如图 6 - 5\mathrm{a} 、 \mathrm{b} 所示。
点 M 的加速度 \mathbf{a} 的大小可从下式求出:
要确定加速度 a 的方向,只需求出 a 与半径 {MO} 所成的交角 \theta 即可 (图 5)。由直角三角形的关系式得
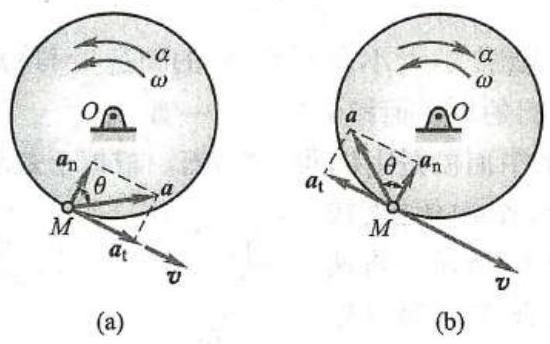
图 5
由于在每一瞬时,刚体的 \omega 和 \alpha 都只有一个确定的数值,因此从式 (8) 、式 (11) 和式 (12) 得知:
(1)在每一瞬时,转动刚体内所有各点的速度和加速度的大小,分别与这些点到轴线的垂直距离成正比;
(2)在每一瞬时,刚体内所有各点的加速度 a 与半径间的夹角 \theta 都有相同的值。
用一垂直于轴线的平面横截刚体,得一截面。根据上述结论,可画出该截面上各点的加速度,如图 6a 所示。在通过轴心的直线上各点的加速度按线性分布,将加速度矢的端点连成直线,此直线通过轴心,如图 6b 所示。
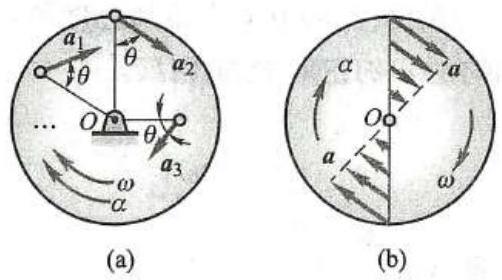
图 6
4 轮系的传动比
工程中,常利用轮系传动提高或降低机械的转速,最常见的有齿轮系和带轮系。
4.1 齿轮传动
机械中常用齿轮作为传动部件,例如,为了要将电动机的转动传到机床的主轴,通常用变速箱降低转速,多数变速箱是由齿轮系组成的。
现以一对啮合的圆柱齿轮为例。圆柱齿轮传动分为外啮合 (图 7) 和内啮合 (图 8) 两种。
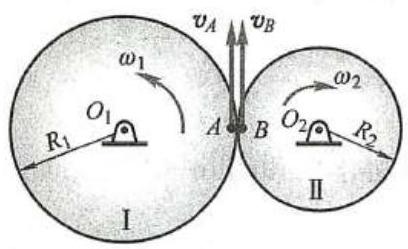
图 7
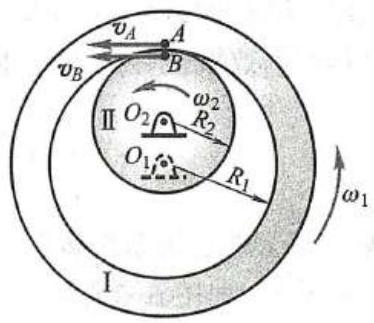
图 8
设两个圆柱齿轮分别绕固定轴 {O}_{1} 和 {O}_{2} 转动。已知其啮合圆半径分别为 {R}_{1} 和 {R}_{2} ; 齿数分别为 {z}_{1} 和 {z}_{2} ; 角速度分别为 {\omega }_{1} 和 {\omega }_{2} 。令点 A 和点 B 分别是两个圆柱齿轮啮合圆的接触点,因两圆之间没有相对滑动,故有
并且速度方向也相同。但 {v}_{B} = {R}_{2}{\omega }_{2},{v}_{A} = {R}_{1}{\omega }_{1} ,因此,有
或
由于圆柱齿轮在啮合圆上的齿距相等,它们的齿数与半径成正比,故有
由此可知: 处于啮合中的两个定轴齿轮的角速度与两齿轮的齿数成反比 (或与两轮的啮合圆半径成反比)。
设轮 \mathrm{I} 是主动轮,轮 \mathrm{{II}} 是从动轮。在机械工程中,常常把主动轮和从动轮的两个角速度的比值称为传动比,用附有下标的符号表示,即.
把式(13)代入上式,得计算传动比的基本公式为
式 (14) 定义的传动比是两个角速度大小的比值,与转动方向无关,因此不仅适用于圆柱齿轮传动,也适用于传动轴成任意角度的圆锥齿轮传动、摩擦轮传动等。
有些场合为了区分轮系中各轮的转向,对各轮都规定统一的转动正向,这时各轮的角速度可取代数值,从而传动比也取代数值,即
式中,正号表示主动轮与从动轮转向相同 (内啮合),如图 8 所示;负号表示二者转向相反 (外啮合),如图 7 所示。
4.2 带传动
在机床中,常用电动机通过传动带使变速箱的轴转动。如图 9 所示的带轮装置中,主动轮和从动轮的半径分别为 {r}_{1} 和 {r}_{2} ,角速度分别为 {\omega }_{1} 和 {\omega }_{2} 。如不考虑传动带的厚度,并假定传动带与带轮间无相对滑动,则应用绕定轴转动的刚体上各点速度的公式,可得到下列关系式:
于是带轮的传动比公式为
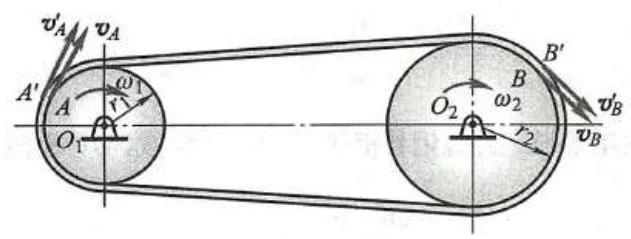
图 9
即两带轮的角速度与其半径成反比。
5 以矢量表示角速度和角加速度,以矢积表示点的速度和加速度
绕定轴转动刚体的角速度可以用矢量表示。角速度矢 \mathbf{\omega } 的大小等于角速度的绝对值,即
角速度矢 \mathbf{\omega } 沿轴线,它的指向表示刚体转动的方向;如果从角速度矢 \mathbf{\omega } 的末端向始端看,则看到刚体做逆时针转向的转动,如图 10a 所示;或按照右手螺旋法则确定:右手的四指代表转动的方向,拇指代表角速度矢 \omega 的指向,如图 10b 所示。至于角速度矢 \mathbf{\omega } 的起点,可在轴线上任意选取,也就是说,角速度矢 \mathbf{\omega } 是滑动矢。
如取转轴为 z 轴,它的正向用单位矢量 \mathbf{k} 的方向表示 (图 11)。于是刚体绕定轴转动的角速度矢 \mathbf{\omega } 可写成
式中,\omega 是角速度的代数值,它等于 \dot{\varphi } 。
同样,刚体绕定轴转动的角加速度也可用一个沿轴线的滑动矢量表示
其中,\alpha 是角加速度的代数值,它等于 \dot{\omega } 或 \ddot{\varphi } 。于是,有
或
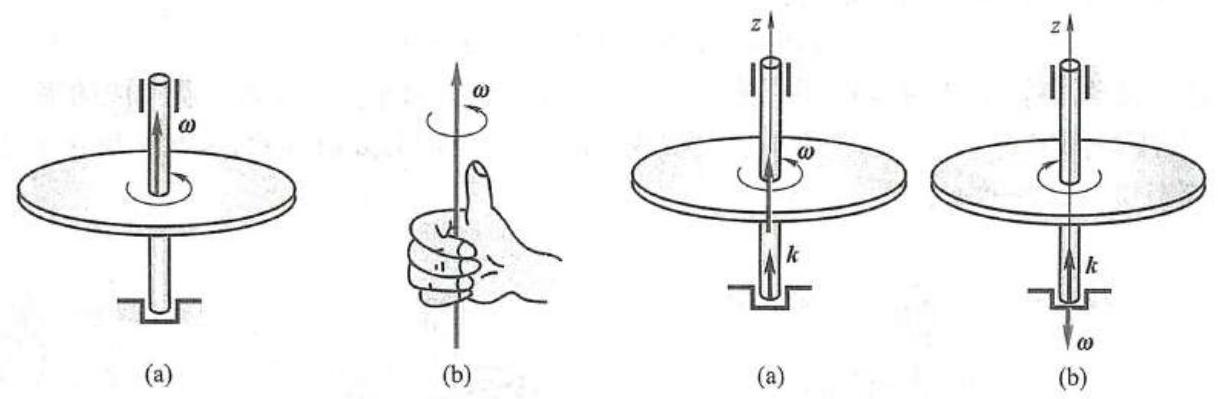
图 10 图 11
即角加速度矢 \mathbf{\alpha } 为角速度矢 \mathbf{\omega } 对时间的一阶导数。
根据上述角速度和角加速度的矢量表示法,刚体内任一点的速度可以用矢积表示。
如在轴线上任选一点 O 为原点,点 M 的矢径以 \mathbf{r} 表示,如图 12 所示。那么,点 M 的速度可以用角速度矢与它的矢径的矢积表示,即
为了证明这一点,需证明矢积 \mathbf{\omega } \times \mathbf{r} 确实表示点 M 的速度矢的大小和方向。
根据矢积的定义知,\mathbf{\omega } \times \mathbf{r} 仍是一个矢量,它的大小是
式中,\theta 是角速度矢 \mathbf{\omega } 与矢径 \mathbf{r} 间的夹角。于是证明了矢积 \mathbf{\omega } \times \mathbf{r} 的大小等于速度的大小。
矢积 \omega \times \mathbf{r} 的方向垂直于 \omega 和 \mathbf{r} 所组成的平面 (即图 12 中 {OM}{O}_{1} 平面),从矢量 \mathbf{v} 的末端向始端看,则见 \mathbf{\omega } 按逆时针转向转过角 \theta 与 \mathbf{r} 重合,由图容易看出,矢积 \omega \times \mathbf{r} 的方向正好与点 M 的速度方向相同。
于是可得结论: 绕定轴转动的刚体上任一点的速度矢等于刚体的角速度矢与该点矢径的矢积。
绕定轴转动的刚体上任一点的加速度矢也可用矢积表示。
因为点 M 的加速度为
把速度的矢积表达式(20)代入,得
已知 \frac{\mathrm{d}\omega }{\mathrm{d}t} = \alpha ,\frac{\mathrm{d}r}{\mathrm{\;d}t} = v ,于是得
式中等号右端第一项的大小为
这结果恰等于点 M 的切向加速度的大小。而 \alpha \times r 的方向垂直于 \alpha 和 r 所构成的平面,指向如图 13 所示,该方向恰与点 M 的切向加速度的方向一致,因此矢积 \mathbf{\alpha } \times \mathbf{r} 等于切向加速度 {\mathbf{a}}_{\mathrm{t}} ,即
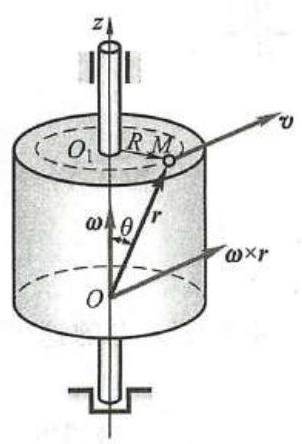
图 12
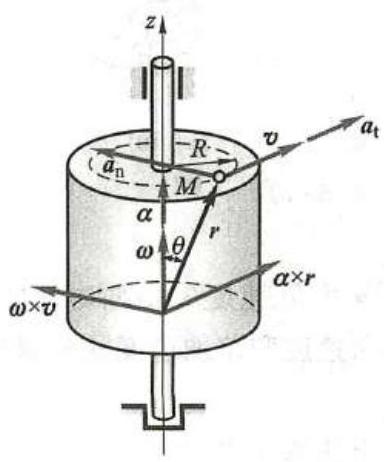
图 13
同理可知,式 (21) 等号右端的第二项等于点 M 的法向加速度,即
于是可得结论:
- 转动刚体内任一点的切向加速度等于刚体的角加速度矢与该点矢径的矢积;
- 法向加速度等于刚体的角速度矢与该点的速度矢的矢积。
例 1 刚体绕定轴转动,已知转轴通过坐标原点 O ,角速度矢为 \omega = 5\sin \frac{\pi t}{2}\left( {i + \sqrt{3}k}\right) \mathrm{{rad}}/\mathrm{s} 。 求当 t = 1\mathrm{\;s} 时,刚体上点 M\left( {0,2,3}\right) 的速度矢及加速度矢。
解:
\mathbf{v} = \mathbf{\omega } \times \mathbf{r} = 5\left| \begin{matrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ 1 & 0 & \sqrt{3} \\ 0 & 2 & 3 \end{matrix}\right| \mathrm{m}/\mathrm{s}= \left( {-{10}\sqrt{3}\mathbf{i} - {15}\mathbf{j} + {10}\mathbf{k}}\right) \mathrm{m}/\mathrm{s}\mathbf{a} = \mathbf{\alpha } \times \mathbf{r} + \mathbf{\omega } \times \mathbf{v} = \frac{\mathrm{d}\mathbf{\omega }}{\mathrm{d}t} \times \mathbf{r} + \mathbf{\omega } \times \mathbf{v}= \left( {{75}\sqrt{3}i - {200j} - {75k}}\right) \mathrm{m}/{\mathrm{s}}^{2}
例 2 某定轴转动刚体的转轴通过点 {M}_{0}\left( {2,1,3}\right) ,其角速度矢 \omega 的方向余弦为 {0.6}\text{、}{0.48} 、 0.64,角速度的大小为 \omega = {25}\mathrm{{rad}}/\mathrm{s} 。求刚体上点 M\left( {{10},7,{11}}\right) 的速度矢。
解: 设原坐标系为 O{x}^{\prime }{y}^{\prime }{z}^{\prime } ,取新坐标系以 {M}_{0} 为原点,记为 {M}_{0}{xyz} ,且 x\text{、}y\text{、}z 轴分别平行于原坐标系的 {x}^{\prime }\text{、}{y}^{\prime }\text{、}{z}^{\prime } 轴。在新坐标系中有
\omega = \omega \left( {{0.6i} + {0.48j} + {0.64k}}\right) = \left( {{15i} + {12j} + {16k}}\right) \mathrm{{rad}}/\mathrm{s}点 M 在新坐标系中的矢径为 \mathbf{r} = \left( {{10} - 2}\right) \mathrm{m} \cdot \mathbf{i} + \left( {7 - 1}\right) \mathrm{m} \cdot \mathbf{j} + \left( {{11} - 3}\right) \mathrm{m} \cdot \mathbf{k} ,于是有
\mathbf{v} = \mathbf{\omega } \times \mathbf{r} = \left| \begin{matrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ {15} & {12} & {16} \\ 8 & 6 & 8 \end{matrix}\right| \mathrm{m}/\mathrm{s} = \left( {8\mathbf{j} - 6\mathbf{k}}\right) \mathrm{m}/\mathrm{s}图 14
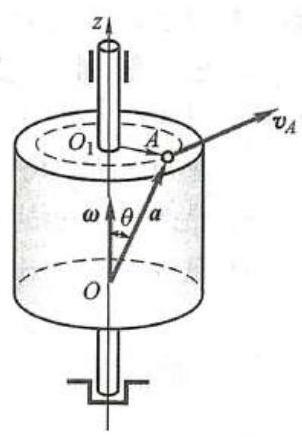
例 3 如图 14 所示,一矢量 \mathbf{a} 绕 z 轴以角速度 \omega 转动,若 \mathbf{a} 的大小始终保持不变,试求 \frac{\mathrm{d}\mathbf{a}}{\mathrm{d}t} 。
解: 将矢量 \mathbf{a} 的端点 A 看成是绕 z 轴做定轴转动刚体上的一点,则
{\mathbf{r}}_{A} = \mathbf{a}从而
\frac{\mathrm{d}\mathbf{a}}{\mathrm{d}t} = \frac{\mathrm{d}{\mathbf{r}}_{A}}{\mathrm{\;d}t} = {\mathbf{v}}_{A} = \mathbf{\omega } \times {\mathbf{r}}_{A} = \mathbf{\omega } \times \mathbf{a} \tag{24}