若在研究物体运动时,其大小和形状的影响可以忽略不计,则物体的运动可以简化为点的运动。研究点相对某一个参考系的几何位置随时间变动的描述方法,包括点的运动方程、运动轨迹、速度和加速度等。
1 矢量法
选取参考系上某确定点 O 为坐标原点,自点 O 向动点 M 作矢量 \mathbf{r},\mathbf{r} 称为点 M 相对原点 O 的位置矢量,也称矢径。当动点 M 运动时,矢径 \mathbf{r} 随时间而变化,并且是时间的单值连续函数,即
上式称为以矢量表示的点的运动方程。动点 M 在运动过程中,其矢径 \mathbf{r} 的末端描绘出一条连续曲线,称之为矢端曲线。显然,矢径 \mathbf{r} 的矢端曲线就是动点 M 的运动轨迹,如图 1 所示。
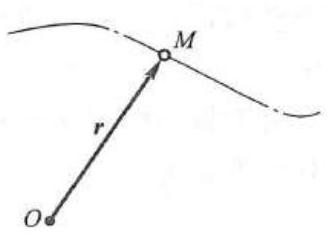
图 1
点的速度是矢量。动点的速度矢等于它的矢径 \mathbf{r} 对时间的一阶导数,即
动点的速度矢沿着矢径 \mathbf{r} 的矢端曲线的切线,即沿动点运动轨迹的切线,并与此点运动的方向一致。速度的大小,即速度矢 \mathbf{v} 的模,表明点运动的快慢,在国际单位制中,速度 v 的单位为 \mathrm{m}/\mathrm{s} 。
点的速度矢对时间的变化率称为加速度。点的加速度也是矢量,它表征了速度大小和方向的变化。动点的加速度矢等于该点的速度矢对时间的一阶导数,或等于矢径对时间的二阶导数,即
有时为了方便,在字母上方加“. ”表示该量对时间的一阶导数,加“.. ”表示该量对时间的二阶导数。因此,式 (2)、式 (3) 亦可记为
在国际单位制中,加速度 a 的单位为 \mathrm{m}/{\mathrm{s}}^{2} 。
如在空间任意取一点 O ,把动点 M 在连续不同瞬时的速度矢 \mathbf{v},{\mathbf{v}}^{\prime },{\mathbf{v}}^{\prime \prime },\cdots 都平行地移到点 O ,连接各矢量的端点 M,{M}^{\prime },{M}^{\prime \prime },\cdots ,就构成了矢量 \mathbf{v} 端点的连续曲线,称为速度矢端曲线,如图 2a 所示。动点的加速度矢 \mathbf{a} 的方向与速度矢端曲线在相应点 M 的切线相平行,如图 2b 所示。

图 2
2 直角坐标法
取一固定的直角坐标系 {Oxyz} ,则动点 M 在任意瞬时的空间位置既可以用它相对于坐标原点 O 的矢径 \mathbf{r} 表示,也可以用它的三个直角坐标 x\text{、}y\text{、}z 表示,如图 3 所示。
由于矢径的原点与直角坐标系的原点重合,因此有如下关系
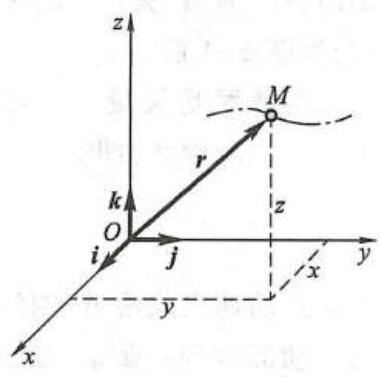
图 3
式中 \mathbf{i} 、 \mathbf{j} 、 \mathbf{k} 分别为沿三个坐标轴的单位矢量,如图 3 所示。由于 \mathbf{r} 是时间的单值连续函数,因此 x\text{、}y\text{、}z 也是时间的单值连续函数。利用式 (4),可以将运动方程 (1) 写为
这些方程称为以直角坐标表示的点的运动方程。如果知道了点的运动方程 (5),就可以求出任一瞬时点的坐标 x\text{、}y\text{、}z 的值,也就完全确定了该瞬时动点的位置。
式 (5) 实际上也是点的运动轨迹的参数方程,只要给定时间 t 的不同数值,依次得出点的坐标 x\text{、}y\text{、}z 的相应数值,根据这些数值就可以描出动点的运动轨迹。
因为动点的运动轨迹与时间无关,如果需要求点的运动轨迹方程,可将运动方程中的时间 t 消去。
在工程中,经常遇到点在某平面内运动的情形,此时点的运动轨迹为一平面曲线。取运动轨迹所在的平面为坐标平面 {Oxy} ,则点的运动方程为
从上式中消去时间 t ,即得运动轨迹方程为
将式 (4) 代入到式 (2) 中,由于 i\text{、}j 和 k 为大小和方向都不变的常矢量,因此有
设动点 M 的速度 v 在直角坐标轴上的投影为 {v}_{x}\text{、}{v}_{y} 和 {v}_{z} ,即
比较式 (8) 和式 (9),得到
因此,速度在各坐标轴上的投影等于动点的各对应坐标对时间的一阶导数。
由式 (10) 求得 {v}_{x}\text{、}{v}_{y} 及 {v}_{z} 后,速度 \mathbf{v} 的大小和方向就可由它的这三个投影完全确定。
同理,设
则有
因此,加速度在直角坐标轴上的投影等于动点的各对应坐标对时间的二阶导数。
加速度 a 的大小和方向由它的三个投影 {a}_{x}\text{、}{a}_{y} 和 {a}_{z} 完全确定。
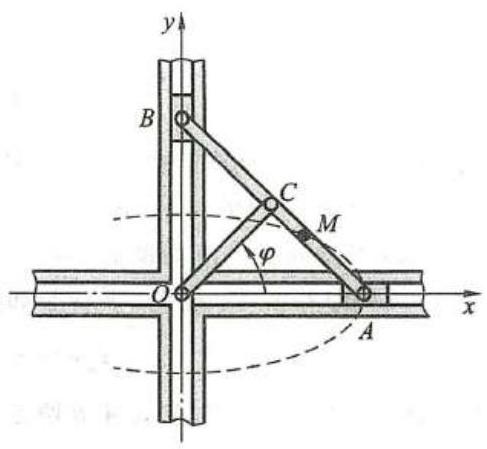
例 1 椭圆规的曲柄 {OC} 可绕定轴 O 转动,其端点 C 与规尺 {AB} 的中点以铰链相连接,而规尺 A\text{、}B 两端分别在相互垂直的滑槽中运动,如图 4 所示。已知:{OC} = {AC} = {BC} = l,{MC} = a,\varphi = {\omega t} 。求规尺上点 M 的运动方程、运动轨迹方程、速度和加速度。
图 4
解:欲求点 M 的运动轨迹方程,可以先用直角坐标法给出它的运动方程,然后从运动方程中消去时间 t ,得到运动轨迹方程。为此,取坐标系 {Oxy} 如图 4 所示,点 M 的运动方程为
x = \left( {{OC} + {MC}}\right) \cos \varphi = \left( {l + a}\right) \cos {\omega t}y = {AM} \cdot \sin \varphi = \left( {l - a}\right) \sin {\omega t}消去时间 t ,得运动轨迹方程为
\frac{{x}^{2}}{{\left( l + a\right) }^{2}} + \frac{{y}^{2}}{{\left( l - a\right) }^{2}} = 1由此可见,点 M 的运动轨迹是一个椭圆,长轴与 x 轴重合,短轴与 y 轴重合。
当点 M 在 {BC} 段上时,椭圆的长轴将与 y 轴重合。读者可自行推算。
为求点的速度,应将点的坐标对时间取一阶导数,得
{v}_{x} = \dot{x} = - \left( {l + a}\right) \omega \sin {\omega t},\;{v}_{y} = \dot{y} = \left( {l - a}\right) \omega \cos {\omega t}故点 M 的速度大小为
v = \sqrt{{v}_{x}^{2} + {v}_{y}^{2}} = \sqrt{{\left( l + a\right) }^{2}{\omega }^{2}{\sin }^{2}{\omega t} + {\left( l - a\right) }^{2}{\omega }^{2}{\cos }^{2}{\omega t}}= \omega \sqrt{{l}^{2} + {a}^{2} - {2al}\cos {2\omega t}}其方向余弦为
\cos \left( {v,i}\right) = \frac{{v}_{x}}{v} = \frac{-\left( {l + a}\right) \sin {\omega t}}{\sqrt{{l}^{2} + {a}^{2} - {2al}\cos {2\omega t}}}\cos \left( {v,j}\right) = \frac{{v}_{y}}{v} = \frac{\left( {l - a}\right) \cos {\omega t}}{\sqrt{{l}^{2} + {a}^{2} - {2al}\cos {2\omega t}}}为求点的加速度,应将点的坐标对时间取二阶导数,得
{a}_{x} = {\dot{v}}_{x} = \ddot{x} = - \left( {l + a}\right) {\omega }^{2}\cos {\omega t}{a}_{y} = {\dot{v}}_{y} = \ddot{y} = - \left( {l - a}\right) {\omega }^{2}\sin {\omega t}故点 M 的加速度大小为
a = \sqrt{{a}_{x}^{2} + {a}_{y}^{2}} = \sqrt{{\left( l + a\right) }^{2}{\omega }^{4}{\cos }^{2}{\omega t} + {\left( l - a\right) }^{2}{\omega }^{4}{\sin }^{2}{\omega t}}= {\omega }^{2}\sqrt{{l}^{2} + {a}^{2} + {2al}\cos {2\omega t}}其方向余弦为
\cos \left( {a,i}\right) = \frac{{a}_{x}}{a} = \frac{-\left( {l + a}\right) \cos {\omega t}}{\sqrt{{l}^{2} + {a}^{2} + {2al}\cos {2\omega t}}}\cos \left( {a,j}\right) = \frac{{a}_{y}}{a} = \frac{-\left( {l - a}\right) \sin {\omega t}}{\sqrt{{l}^{2} + {a}^{2} + {2al}\cos {2\omega t}}}
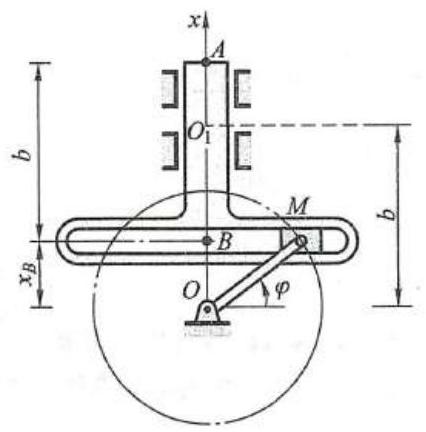
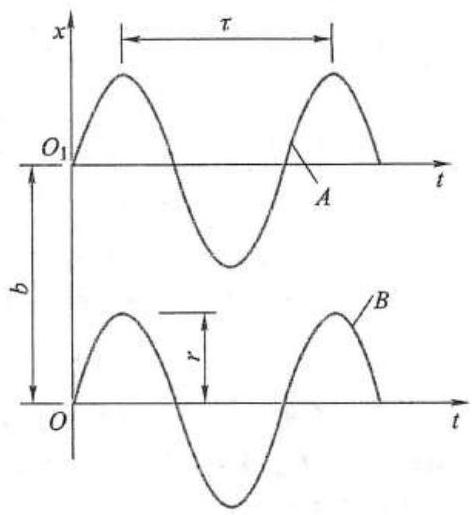
例 2 正弦机构如图 5 所示。曲柄 {OM} 长为 r ,绕 O 轴匀速转动,它与水平线间的夹角为 \varphi = {\omega t} + \theta ,其中 \theta 为 t = 0 时的夹角,\omega 为一常数。已知动杆上 A\text{、}B 两点的距离为 b 。求点 A 和点 B 的运动方程及点 B 的速度和加速度。
解:A\text{、}B 两点都做直线运动。取 x 轴如图所示,于是 A\text{、}B 两点的坐标分别为
{x}_{A} = b + r\sin \varphi ,\;{x}_{B} = r\sin \varphi将坐标写成时间的函数,即得 A\text{、}B 两点沿 x 轴的运动方程为
{x}_{A} = b + r\sin \left( {{\omega t} + \theta }\right) ,\;{x}_{B} = r\sin \left( {{\omega t} + \theta }\right)为了使点的运动情况一目了然,常常将点的坐标与时间的函数关系绘成图线,一般取横轴为时间轴,纵轴为点的坐标轴,绘出的图线称为运动图线。图 6 中的曲线分别为 A\text{、}B 两点的运动图线。
当点做直线往复运动,并且运动方程可写成时间的正弦函数或余弦函数时,这种运动称为直线简谐振动。往复运动的中心称为振动中心。动点偏离振动中心最远的距离 r 称为振幅。用
来确定动点位置的角 \varphi = {\omega t} + \theta 称为相位,用来确定动点初始位置的角 \theta 称为初相位。
图 5
图 6
动点往复运动一次所需的时间 \tau 称为振动的周期。由于时间经过一个周期,相位应增加 {2\pi } ,即
\omega \left( {t + \tau }\right) + \theta = \left( {{\omega t} + \theta }\right) + {2\pi }故得
\tau = \frac{2\pi }{\omega }周期 \tau 的倒数 f = \frac{1}{\tau } 称为频率,表示每秒振动的次数,其单位为 {\mathrm{s}}^{-1} ,或称为赫兹 \left( \mathrm{{Hz}}\right) 。 \omega 称为振动的角频率,因为
\omega = \frac{2\pi }{\tau } = {2\pi f}所以角频率表示在 {2\pi } 秒内振动的次数。
将点 B 的运动方程对时间取一阶导数,即得点 B 的速度为
v = {\dot{x}}_{B} = {r\omega }\cos \left( {{\omega t} + \theta }\right)点 B 的加速度为
a = {\ddot{x}}_{B} = - r{\omega }^{2}\sin \left( {{\omega t} + \theta }\right) = - {\omega }^{2}{x}_{B}从上式看出,简谐振动的特征之一是加速度的大小与动点的位移成正比,而方向相反。
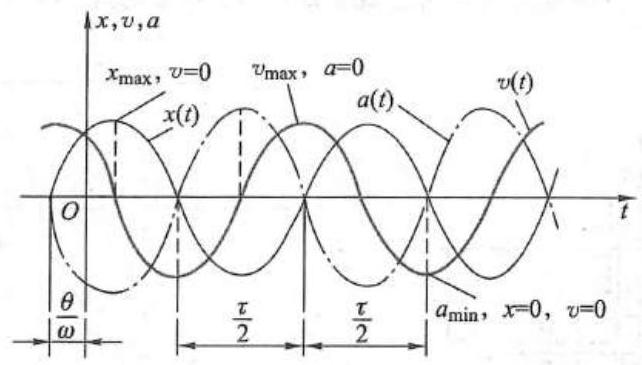
为了形象地表示动点的速度和加速度随时间变化的规律,将 v 和 a 随 t 变化的函数关系画成曲线,这些曲线分别称为速度图线和加速度图线。在图 7 中,表示出简谐振动的运动图线、 速度图线和加速度图线。从图中可知,动点在振动中心时,速度值最大,加速度值为零;在两端位置时,加速度值最大,速度值为零;又知,点从振动中心向两端运动是减速运动,而从两端回到中心的运动是加速运动。
图 7
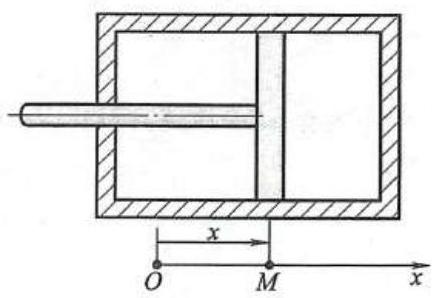
例 3 如图 8 所示,当液压减震器工作时,它的活塞在套筒内做直线往复运动。设活塞的加速度 a = - {kv} ( v 为活塞的速度,k 为比例常数),初速度为 {v}_{0} ,求活塞的运动规律。
解:活塞做直线运动,取 x 轴如图所示。因
\dot{v} = a图 8
代入已知条件,得
\dot{v} = - {kv}将变量分离后积分,得
{\int }_{{v}_{0}}^{v}\frac{\mathrm{d}v}{v} = - k{\int }_{0}^{t}\mathrm{\;d}t得
\ln \frac{v}{{v}_{0}} = - {kt}解得
v = {v}_{0}{\mathrm{e}}^{-{kt}}又因
v = \dot{x} = {v}_{0}{\mathrm{e}}^{-{kt}}对上式积分,即
{\int }_{{x}_{0}}^{x}\mathrm{\;d}x = {v}_{0}{\int }_{0}^{t}{\mathrm{e}}^{-{kt}}\mathrm{\;d}t解得
x = {x}_{0} + \frac{{v}_{0}}{k}\left( {1 - {\mathrm{e}}^{-{kt}}}\right)
3 自然法
利用点的运动轨迹建立弧坐标及自然轴系,并用它们来描述和分析点的运动的方法称为自然法。
3.1 弧坐标
设动点 M 的运动轨迹为如图 9 所示的曲线,则动点 M 在运动轨迹上的位置可以这样确定:在运动轨迹上任选一点 O 为参考点,并设点 O 的某一侧为正向,动点 M 在运动轨迹上的位置由弧长确定,视弧长 s 为代数量,称它为动点 M 在运动轨迹上的弧坐标。当动点 M 运动时,s 随着时间变化,它是时间的单值连续函数,即
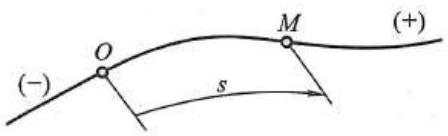
图 9
上式称为点沿运动轨迹的运动方程,或以弧坐标表示的点的运动方程。如果已知点的运动方程式 (13),可以确定任一瞬时点的弧坐标 s 的值,也就确定了该瞬时动点在运动轨迹上的位置。
3.2 速度的弧坐标表达式
将式(13)代入式(2),得
当 {\Delta s} \rightarrow 0 时,{\Delta r} 趋近于运动轨迹在点 M 的切线方向 (图 10),且
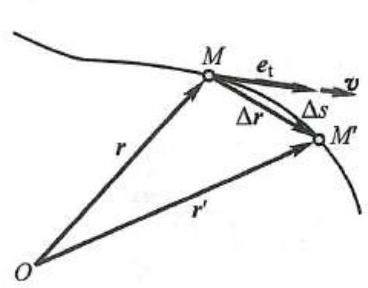
图 10
引入
为沿运动轨迹切线方向的单位矢量,称之为切线基矢量,则
式 (15) 即为点的速度在弧坐标中的表达式。由此可得结论:速度的大小等于动点的弧坐标对时间的一阶导数的绝对值。
弧坐标对时间的导数是一个代数量,以 v 表示,称之为速率。
如 \dot{s} > 0 ,则 s 随时间增加而增大,点沿运动轨迹的正向运动; 如 \dot{s} < 0 ,则点沿运动轨迹的负向运动。于是 v 的绝对值表示速度的大小,它的正负号表示点沿运动轨迹运动的方向,因此点的速度矢可写为
3.3 加速度的弧坐标表达式
将式(16)代入式(3),得
而
下面求 {\mathbf{e}}_{\mathrm{t}} 对弧坐标的导数。在运动轨迹曲线上取极为接近的两点 M 和 {M}^{\prime } ,其间的弧长为 {\Delta s} ,这两点切线的单位矢量分别为 {\mathbf{e}}_{\mathrm{t}} 和 {\mathbf{e}}_{\mathrm{t}}^{\prime } ,其指向与弧坐标正向一致,如图 11 所示。将 {\mathbf{e}}_{\mathrm{t}}^{\prime } 平移至点 M ,记为 {\mathbf{e}}_{\mathrm{t}}^{\prime \prime } ,则 {\mathbf{e}}_{\mathrm{t}} 和 {\mathbf{e}}_{\mathrm{t}}^{\prime \prime } 决定一平面。令 {M}^{\prime } 无限趋近点 M ,则此平面趋近于某一极限位置,此极限平面称为曲线在点 M 的密切面 (图 12)。过点 M 并与切线垂直的平面称为法平面,法平面与密切面的交线称为主法线。令沿主法线的单位矢量为 {\mathbf{e}}_{\mathrm{n}} ,指向曲线内凹一侧,并通过曲线在点 M 的曲率中心,称之为主法线基矢量。
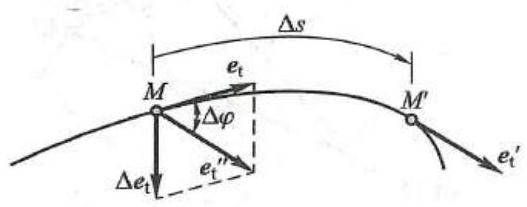
图 11
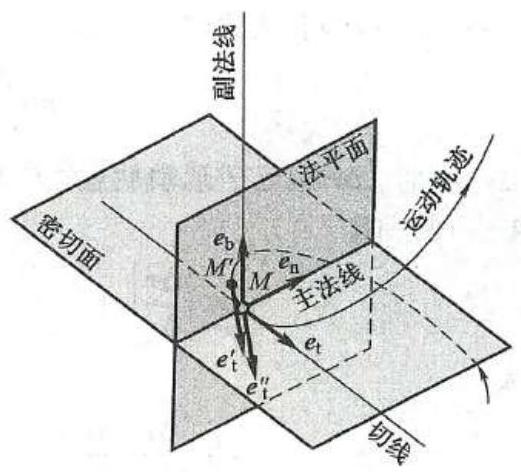
图 12
由图 (11),当 {\Delta s} \rightarrow 0 时,{\Delta \varphi } \rightarrow 0,\Delta {\mathbf{e}}_{\mathrm{t}} 的方向趋于 {\mathbf{e}}_{\mathrm{n}} 的方向。由
得
其中 \rho 为运动轨迹在点 M 的曲率半径。从而有
将式(18)、式(19)代入式(17),得
其中,第一项沿运动轨迹的切线方向,称之为切向加速度,记为 {a}_{1} ;第二项沿运动轨迹的主法线方向,称之为法向加速度,记为 {a}_{\mathrm{n}} 。下面对它们分别作进一步的说明。
(1) 切向加速度 {\mathbf{a}}_{\mathrm{t}}
令
则
显然,{a}_{\mathrm{t}} 即为 {a}_{\mathrm{t}} 在切线基矢量 {e}_{\mathrm{t}} 方向上的投影。当 \dot{v} > 0,{a}_{\mathrm{t}} 指向运动轨迹的正向; 如 \dot{v} < 0,{a}_{\mathrm{t}} 指向运动轨迹的负向。由此可得结论:切向加速度反映点的速度值对时间的变化率,它的方向沿运动轨迹切线,它在切线基矢量方向上的投影等于速率对时间的一阶导数,或弧坐标对时间的二阶导数。
(2)法向加速度 {\mathbf{a}}_{\mathrm{n}}
令
则
由 {\mathbf{e}}_{\mathrm{n}} 的定义及 {a}_{\mathrm{n}} 的表达式可知:法向加速度反映点的速度方向改变的快慢程度,它的大小等于点的速度的平方除以曲率半径,它的方向沿着主法线,指向曲率中心。
正如前面分析的那样,切向加速度表明速度大小的变化率,而法向加速度只反映速度方向的变化,因此,当速度 v 与切向加速度 {a}_{\mathrm{t}} 的指向相同时,即 v 与 {a}_{\mathrm{t}} 的符号相同时,速度的绝对值不断增加,点做加速运动,如图 13a 所示; 当速度 v 与切向加速度 {a}_{\mathrm{t}} 的指向相反时,即 v 与 {a}_{\mathrm{t}} 的符号相反时,速度的绝对值不断减小,点做减速运动,如图 13b 所示。
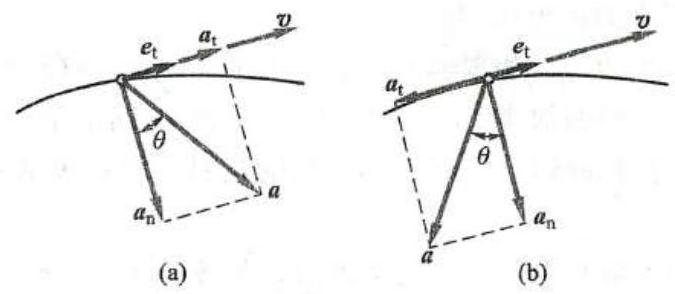
图 13
3.4 自然轴系
由式 (14)、式 (19) ,令
称之为运动轨迹在点 M 处的副法线基矢量,{\mathbf{e}}_{\mathrm{b}}\text{、}{\mathbf{e}}_{\mathrm{t}} 和 {\mathbf{e}}_{\mathrm{n}} 构成右手坐标系。以点 M 为原点,以切线、主法线和副法线为坐标轴组成的正交坐标系称为曲线在点 M 的自然坐标系,这三个轴称为自然轴。注意,随着点 M 在运动轨迹上运动,{\mathbf{e}}_{\mathrm{b}}\text{、}{\mathbf{e}}_{\mathrm{i}} 和 {\mathbf{e}}_{\mathrm{n}} 的方向也在不断变动,自然坐标系是沿曲线而变动的游动坐标系,又称之为局部坐标系或曲线坐标系 (图 12),而式 (15) 和式 (20) 则分别是速度矢和加速度矢在自然坐标系中的表达式。
由于全加速度矢 \mathbf{a} 在副法线轴上的投影等于零,因此 \mathbf{a} 始终处于密切面内,其大小为
它与主法线间的夹角的正切为
当 a 与切线基矢量 {e}_{1} 的夹角为锐角时 \theta 为正,否则为负 (图 13b)。
如果动点的切向加速度的代数值保持不变,即 {a}_{1} 为常量,则动点的运动称为曲线匀变速运动。现在来求它的运动规律。
由
积分得
式中,{v}_{0} 是在 t = 0 时点的速度。
再积分,得
式中,{s}_{0} 是在 t = 0 时点的弧坐标。
式(28)和式(29)与物理学中点做匀变速直线运动的公式完全相似,只不过点做曲线运动时,式中的加速度应该是切向加速度 {a}_{1} ,而不是全加速度 a 。这是因为点做曲线运动时,反映运动速度大小变化的只是全加速度的一个分量——切向加速度。
了解上述关系后,容易得到曲线运动的运动规律。例如,所谓曲线匀速运动,即动点速度的代数值保持不变,与直线匀速运动的公式相比,即得
应注意,在一般曲线运动中,除 v = 0 的瞬时外,点的法向加速度 {a}_{\mathrm{n}} 总不等于零。直线运动为曲线运动的一种特殊情况,曲率半径 \rho \rightarrow \infty ,任何瞬时点的法向加速度始终为零。
例 4 列车沿半径为 R = {800}\mathrm{\;m} 的圆弧轨道做匀加速运动。如初速度为零,经过 2\mathrm{\;{min}} 后,
速度达到 {54}\mathrm{\;{km}}/\mathrm{h} 。求列车在起点和终点的加速度。
解:由于列车沿圆弧轨道做匀加速运动,切向加速度 {a}_{1} 为常量。于是有方程
\frac{\mathrm{d}v}{\mathrm{\;d}t} = {a}_{\mathrm{t}}积分一次,得
v = {a}_{1}t当 t = 2\mathrm{\;{min}} = {120}\mathrm{\;s} 时,v = {54}\mathrm{\;{km}}/\mathrm{h} = {15}\mathrm{\;m}/\mathrm{s} ,代入上式,求得
{a}_{\mathrm{t}} = \frac{{15}\mathrm{\;m}/\mathrm{s}}{{120}\mathrm{\;s}} = {0.125}\mathrm{\;m}/{\mathrm{s}}^{2}在起点,v = 0 ,因此法向加速度等于零,列车只有切向加速度为
{a}_{\mathrm{t}} = {0.125}\mathrm{\;m}/{\mathrm{s}}^{2}在终点时速度不等于零,既有切向加速度,又有法向加速度,而
{a}_{\mathrm{t}} = {0.125}\mathrm{\;m}/{\mathrm{s}}^{2},\;{a}_{\mathrm{n}} = \frac{{v}^{2}}{R} = \frac{{\left( {15}\mathrm{\;m}/\mathrm{s}\right) }^{2}}{{800}\mathrm{\;m}} = {0.281}\mathrm{\;m}/{\mathrm{s}}^{2}终点的全加速度大小为
a = \sqrt{{a}_{\mathrm{t}}^{2} + {a}_{\mathrm{n}}^{2}} = {0.308}\mathrm{\;m}/{\mathrm{s}}^{2}终点的全加速度与法向的夹角 \theta 为
\tan \theta = \frac{{a}_{\mathrm{t}}}{{a}_{\mathrm{n}}} = {0.443},\;\theta = {23}^{ \circ }{54}^{\prime }
例 5 已知点的运动方程为 x = 2\sin {4t},y = 2\cos {4t},z = {4t} (其中 x\text{、}y\text{、}z 均以 \mathrm{m} 计,t 以 \mathrm{s} 计)。 求点运动轨迹的曲率半径 \rho 。
解:点的速度和加速度沿 x\text{、}y\text{、}z 轴的投影分别为
\dot{x} = 8\cos {4t},\;\ddot{x} = - {32}\sin {4t}\dot{y} = - 8\sin {4t},\;\ddot{y} = - {32}\cos {4t}\dot{z} = 4,\;\ddot{z} = 0式中,\dot{x}\text{、}\dot{y}\text{、}\dot{z} 以 \mathrm{m}/\mathrm{s} 计,\ddot{x}\text{、}\ddot{y}\text{、}\ddot{z} 以 \mathrm{m}/{\mathrm{s}}^{2} 计,t 以 \mathrm{s} 计。
点的速度和全加速度大小分别为
v = \sqrt{{\dot{x}}^{2} + {\dot{y}}^{2} + {\dot{z}}^{2}} = \sqrt{80}\mathrm{\;m}/\mathrm{s},\;a = \sqrt{{\ddot{x}}^{2} + {\ddot{y}}^{2} + {\ddot{z}}^{2}} = {32}\mathrm{\;m}/{\mathrm{s}}^{2}点的切向加速度与法向加速度大小分别为
{a}_{\mathrm{t}} = \dot{v} = 0,\;{a}_{\mathrm{n}} = \frac{{v}^{2}}{\rho } = \frac{{\left( \sqrt{80}\mathrm{\;m}/\mathrm{s}\right) }^{2}}{\rho }由于
a = \sqrt{{a}_{\mathrm{t}}^{2} + {a}_{\mathrm{n}}^{2}} = {32}\mathrm{\;m}/{\mathrm{s}}^{2} = {a}_{\mathrm{n}}因此
\rho = {2.5}\mathrm{\;m}这是在半径为 2\mathrm{\;m} 的圆柱面上的匀速螺旋线运动。点的加速度也是常量,指向此圆柱面的轴线。注意其运动轨迹的曲率半径并不等于圆柱面的半径。
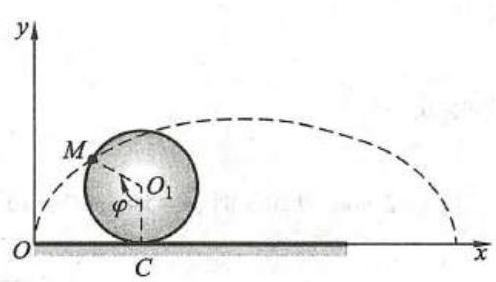
例 6 半径为 r 的轮子沿直线轨道无滑动地滚动 (称为纯滚动),设轮子转角 \varphi = {\omega t}(\omega 为
常值),如图 14 所示。求用直角坐标和弧坐标表示的轮缘上任一点 M 的运动方程,并求该点的速度、切向加速度及法向加速度。
解:取点 M 与直线轨道的接触点 O 为原点,建立直角坐标系 {Oxy}\left( \text{图 14}\right) 。当轮子转过 \varphi 角时,轮子与直线轨道的接触点为 C 。由于是纯滚动,有
{OC} = \overset{⏜}{MC} = {r\varphi } = {r\omega t}图 14
则用直角坐标表示的点 M 的运动方程为
\left. \begin{array}{l} x = {OC} - {O}_{1}M \cdot \sin \varphi = r\left( {{\omega t} - \sin {\omega t}}\right) \\ y = {O}_{1}C - {O}_{1}M \cdot \cos \varphi = r\left( {1 - \cos {\omega t}}\right) \end{array}\right\} \tag{a}上式对时间求导,即得点 M 的速度沿坐标轴的投影为
{v}_{x} = \dot{x} = {r\omega }\left( {1 - \cos {\omega t}}\right) ,\;{v}_{y} = \dot{y} = {r\omega }\sin {\omega t} \tag{b}点 M 的速度为
v = \sqrt{{v}_{x}^{2} + {v}_{y}^{2}} = {r\omega }\sqrt{2 - 2\cos {\omega t}} = {2r\omega }\sin \frac{\omega t}{2}\;\left( {0 \leq {\omega t} \leq {2\pi }}\right) \tag{c}运动方程式 (a) 实际上也是点 M 运动轨迹的参数方程 (以 t 为参变量)。这是一个摆线 (或称旋轮线) 方程,这表明点 M 的运动轨迹是摆线,如图 14 所示。
取点 M 的起始点 O 作为弧坐标原点,将式 (c) 的速度 v 积分,即得用弧坐标表示的运动方程:
s = {\int }_{0}^{t}{2r\omega }\sin \frac{\omega t}{2}\mathrm{\;d}t = {4r}\left( {1 - \cos \frac{\omega t}{2}}\right) \;\left( {0 \leq {\omega t} \leq {2\pi }}\right)将式 (b) 再对时间求导,即得加速度在直角坐标轴上的投影:
{a}_{x} = \ddot{x} = r{\omega }^{2}\sin {\omega t},\;{a}_{y} = \ddot{y} = r{\omega }^{2}\cos {\omega t} \tag{d}由此得到全加速度为
a = \sqrt{{a}_{x}^{2} + {a}_{y}^{2}} = r{\omega }^{2}将式 (c) 对时间求导,即得点 M 的切向加速度为
{a}_{1} = \dot{v} = r{\omega }^{2}\cos \frac{\omega t}{2}法向加速度为
{a}_{\mathrm{n}} = \sqrt{{a}^{2} - {a}_{\mathrm{t}}^{2}} = r{\omega }^{2}\sin \frac{\omega t}{2} \tag{e}由于 {a}_{\mathrm{n}} = \frac{{v}^{2}}{\rho } ,于是还可由式 (c) 及式 (e) 求得运动轨迹的曲率半径为
\rho = \frac{{v}^{2}}{{a}_{\mathrm{n}}} = \frac{4{r}^{2}{\omega }^{2}{\sin }^{2}\frac{\omega t}{2}}{r{\omega }^{2}\sin \frac{\omega t}{2}} = {4r}\sin \frac{\omega t}{2}再讨论一个特殊情况。当 t = {2\pi }/\omega 时,\varphi = {2\pi } ,这时点 M 运动到与地面相接触的位置。由式 (c) 知,此时点 M 的速度为零,这表明沿地面做纯滚动的轮子与地面接触点的速度为零。由于点 M 全加速度的大小恒为 r{\omega }^{2} ,因此纯滚动的轮子与地面接触点的速度虽然为零,但是加速度却不为零。将 t = {2\pi }/\omega 代入式 (d),得
{a}_{x} = 0,\;{a}_{y} = r{\omega }^{2}即接触点的加速度方向向上。
4 点的速度和加速度在柱坐标及极坐标中的投影
如果动点的运动方程以柱坐标 \rho \text{、}\varphi 和 z 表示,则点的速度和加速度也可在柱坐标上投影。
设柱坐标的单位矢量为 {\mathbf{e}}_{\rho } 、 {\mathbf{e}}_{\varphi } 和 \mathbf{k} ,三个矢量相互垂直,组成右手坐标系,其中 k 沿 z 轴正向,{e}_{\rho } 和 {e}_{\varphi } 指向 \rho 和 \varphi 增大的方向,如图 15 所示。
动点 M 的矢径 \mathbf{r} 可用柱坐标表示,即
点 M 的速度为
因为 k 为常矢量,有
由于
由图 16 可见,\frac{\mathrm{d}{\mathbf{e}}_{\rho }}{\mathrm{d}t} 的大小为
\frac{\mathrm{d}{\mathbf{e}}_{\rho }}{\mathrm{d}t} 的方向为 \Delta {\mathbf{e}}_{\rho } 的极限方向。当 {\Delta t} \rightarrow 0 时,\beta \rightarrow \frac{\pi }{2} ,即 \frac{\mathrm{d}{\mathbf{e}}_{\rho }}{\mathrm{d}t} 与 {\mathbf{e}}_{\rho } 垂直,指向旋转的方向,即 {\mathbf{e}}_{\varphi } 的方向。因此有
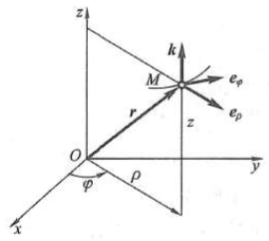

图 15 图 16
对于在平面内旋转的单位矢量都有相同的结论:单位矢量对时间的一阶导数是在旋转平面内的另一矢量,它的大小等于矢量的转角对时间的一阶导数的绝对值,它的方向与原矢量垂直,指向旋转方向。
于是,点 M 的速度为
点的速度在柱坐标中的投影为
点的加速度等于速度矢对时间的一阶导数,即
根据在平面内旋转的单位矢量对时间取一阶导数的结论,有
将上式代入前式中,整理后可写成
于是点的加速度在柱坐标中的投影为
当动点 M 的运动轨迹为平面曲线时,{v}_{z} = 0,{a}_{z} = 0 ,于是式 (32) 和式 (34) 中的前两式就是点的速度和加速度在极坐标中的投影式。
例 7 图 17 中的凸轮绕 O 轴匀速转动,使杆 {AB} 升降。欲使杆 {AB} 匀速上升,凸轮上的 {CD} 段轮廓线应是什么曲线?
解:以凸轮为参考系,取极坐标研究杆 {AB} 上点 A 的运动。
图 17
根据题意有
\frac{\mathrm{d}\varphi }{\mathrm{d}t} = \omega \left( \text{ 常值 }\right) ,\;\frac{\mathrm{d}\rho }{\mathrm{d}t} = v\left( \text{ 常值 }\right)将上式对时间积分一次,并设点 C 为动点 A 在 t = 0 时的初始位置,于是得以极坐标表示的点 A 相对于凸轮的运动方程为
\varphi = {\omega t},\;\rho = R + {vt}消去时间 t ,得点 A 在凸轮上的轨迹方程为
\rho = R + \frac{v\varphi }{\omega }凸轮转动,杆 {AB} 匀速上升,v 、 \omega 为常值,上式为阿基米德螺旋线。

5 点的速度和加速度在球坐标中的投影
当动点的运动方程以球坐标表示时,则点的速度和加速度可向球坐标投影。
设球坐标的单位矢量为 {\mathbf{e}}_{r} 、 {\mathbf{e}}_{\theta } 和 {\mathbf{e}}_{\varphi } ,三个矢量相互垂直形成右手坐标系,其中 {\mathbf{e}}_{r} 沿矢径 \mathbf{r} 的方向,{\mathbf{e}}_{\theta } 和 {\mathbf{e}}_{\varphi } 分别指向角 \theta 和 \varphi 增大的方向,如图 18 所示。
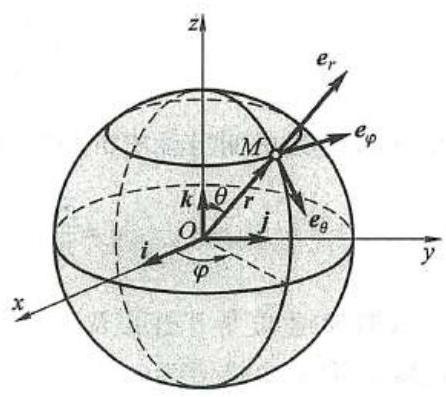
图 18
因为在推导速度和加速度的公式时都将遇到单位矢量的导数,所以先求出 \mathbf{e},{\mathbf{e}}_{\theta } 和 {\mathbf{e}}_{\varphi } 对时间的一阶导数。
从图中易见:
(35)
将它们对时间取一阶导数,得
由式 (35) 知,上式第一个括号内为 {\mathbf{e}}_{\theta } ,第二个括号内为 \sin \theta \cdot {\mathbf{e}}_{\varphi } ,于是得
同样可求得
现在来推导速度和加速度的公式。
动点 M 的速度等于矢径 \mathbf{r} 对时间的一阶导数,即
用球坐标表示矢径 \mathbf{r} 为
于是有
将式(36)代入上式中,得
于是点的速度在球坐标中的投影为
点的加速度等于速度矢对时间的一阶导数。仿照上述推导过程,得点的加速度在球坐标中的投影为